SVPWM的原理讲解在这儿:https://blog.csdn.net/qlexcel/article/details/74787619#comments
现在开始分析C语言的代码(代码建议复制到notepad++中查看),为方便读者试验,每个代码都是独立的子模块,复制到工程中就可以编译运行:
一、配置高级定时器TIM1产生6路互补PWM,带刹车保护
详细配置代码如下,把下面的程序段拷贝到main.c中直接就可以输出PWM波形(要保证BKIN下拉),方便读者验证:
static void TIM1_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9| GPIO_Pin_10 | GPIO_Pin_11; //CH1--A8 CH2--A9 CH3--A10 CH4-A11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 CH1N-B13 CH2N-B14 CH3N-B15 BKIN-B12
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 | GPIO_Pin_13| GPIO_Pin_14 | GPIO_Pin_15;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //BKIN-B12
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_PinLockConfig(GPIOA, GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 ); //锁住高侧IO口的配置寄存器,避免后面误修改
}
#define CKTIM ((u32)72000000uL) //主频
#define PWM_PRSC ((u8)0) //TIM1分频系数
#define PWM_FREQ ((u16) 15000) //PWM频率(Hz)
#define PWM_PERIOD ((u16) (CKTIM / (u32)(2 * PWM_FREQ *(PWM_PRSC+1))))
#define REP_RATE (1) //该参数可以调整电流环的刷新频率,刷新周期:(REP_RATE + 1)/(2*PWM_FREQ) 秒
//因为电流环的采样是靠TIM1来触发的
#define DEADTIME_NS ((u16)1000) //死区时间(ns),范围:0-3500
#define DEADTIME (u16)((unsigned long long)CKTIM/2 * (unsigned long long)DEADTIME_NS/1000000000uL)
static void TIM1_Mode_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_BDTRInitTypeDef TIM1_BDTRInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseStructure.TIM_Period = PWM_PERIOD; //计数周期
TIM_TimeBaseStructure.TIM_Prescaler = PWM_PRSC; //分频系数
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV2; //设置外部时钟TIM1ETR的滤波时间
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_CenterAligned1; //中央对齐模式1,从0计数到 TIM_Period 然后开始减到0,循环
TIM_TimeBaseStructure.TIM_RepetitionCounter = REP_RATE; //重复计数,就是重复溢出多少次才产生一个溢出中断(产生更新事件,用来触发ADC采样)
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //配置为PWM模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //使能CHx的PWM输出
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;//互补输出使能,使能CHxN的PWM输出
TIM_OCInitStructure.TIM_Pulse = 800; //设置跳变值,当计数器计数到这个值时,电平发生跳变
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //CHx有效电平的极性为高电平(高侧)
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High; //CHxN有效电平的极性为高电平(低侧)
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; //在空闲时CHx输出低(高侧), 调用TIM_CtrlPWMOutputs(TIM1, DISABLE)后就是空闲状态。
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Set; //在空闲时CHxN输出高(低侧),打开低侧管子可以用来锁电机
//TIM_OCIdleState 和 TIM_OCNIdleState不能同时为高
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //配置CH1
TIM_OCInitStructure.TIM_Pulse = 800;
TIM_OC2Init(TIM1, &TIM_OCInitStructure); //配置CH2
TIM_OCInitStructure.TIM_Pulse = 800;
TIM_OC3Init(TIM1, &TIM_OCInitStructure); //配置CH3
//设置刹车特性,死区时间,锁电平,OSSI,OSSR状态和AOE(自动输出使能)
TIM1_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable; //MOE=1且定时器不工作时,CHx和CHxN的输出状态
TIM1_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable; //MOE=0且定时器不工作时,CHx和CHxN的输出状态(详情看用户手册,一般都是ENABLE,不用深究)
TIM1_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_1; //BDTR寄存器写保护等级,防止软件错误误写。
TIM1_BDTRInitStructure.TIM_DeadTime = DEADTIME; //设置死区时间
TIM1_BDTRInitStructure.TIM_Break = TIM_Break_Enable; //使能TIM1刹车输入(BKIN),要把BKIN引脚拉低才有PWM输出
TIM1_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High; //刹车输入(BKIN)输入高电平有效
TIM1_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Disable; //刹车有效标志只能被软件清除,不能被自动清除
TIM_BDTRConfig(TIM1, &TIM1_BDTRInitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //4个抢先级、4个子优先级
/* Enable the TIM1 BRK Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM1_BRK_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_SelectOutputTrigger(TIM1, TIM_TRGOSource_Update); //使用TIM1的更新事件作为触发输出,这个输出可以触发ADC进行采样,电流环的采样
TIM_ClearITPendingBit(TIM1, TIM_IT_Break); //清除刹车中断,BKIN输入导致的中断
TIM_ITConfig(TIM1, TIM_IT_Break, ENABLE); //使能刹车中断
TIM_CtrlPWMOutputs(TIM1, ENABLE); //PWM输出使能
TIM_Cmd(TIM1, ENABLE); //使能TIM1
}
void TIM1_PWM_Init(void)
{
TIM1_GPIO_Config();
TIM1_Mode_Config();
}
/*******************************************************************************
* Function Name : TIM1_BRK_IRQHandler
* Description : This function handles TIM1 Break interrupt request.
*******************************************************************************/
void TIM1_BRK_IRQHandler(void)
{
//关闭IGBT,并报错
TIM_ClearITPendingBit(TIM1, TIM_IT_Break);
}1、配置TIM1的CH1--A8、CH2--A9、CH3--A10、CH4-A11、CH1N-B13、CH2N-B14、CH3N-B15、BKIN-B12
BKIN作为报警信号或者刹车信号的输入,当检测此信号时,TIM1的PWM会硬件上停止输出,实时性好,起到保护硬件电路的作用。
2、观察SVPWM的PWM波形是对称的:

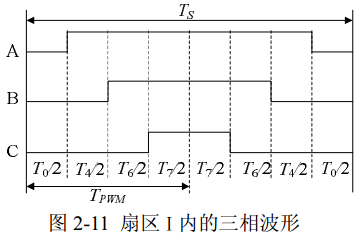
正好配置TIM1为中央对齐模式1,在上面代码的配置中,载波周期为15KHz,TIM_Period(ARR)=2400,CH1的TIM_Pulse(CCR)=800。采用的PWM1模式,即CNT小于CCR时,输出有效电平,大于CCR小于ARR时,输出无效电平,又配置CHx的有效电平为高电平,CHxN的有效电平为高电平,则可以得到下面的PWM波形:

如果CHxN的有效电平是低电平,则输出的CHx和CHxN的波形是相同的。(可能CHx和CHxN有效电平的叫法相反)
3、配置CHx和CHxN空闲时的电平,调用TIM_CtrlPWMOutputs(TIM1, DISABLE)后,就进入空闲状态了,高侧没什么用,让空闲时低侧的管子导通,可以使相线连在一起,起到锁定的作用。
4、改变 REP_RATE 的值,可以更改TRGO信号输出的频率。因为相电流采样由TIM1的TRGO信号触发,故更改REP_RATE可以调整电流环的计算频率(每次相电流采样后,会进行一次FOC运算)。采样频率关系:(2*PWM_FREQ)/(REP_RATE + 1),如:当PWM_FREQ=15KHz,REP_RATE=0,则采样频率为30KHz。
5、TIM_OSSRState和TIM_OSSIState直接Enable就可以了,详情可以去看用户手册。
6、使用TIM_SelectOutputTrigger(TIM1, TIM_TRGOSource_Update);函数设置TRGO信号的产生源,TIM_TRGOSource_Update参数代表TIM1产生一次更新事件,就输出一次TRGO信号。TRGO信号用来触发相电流的采样。
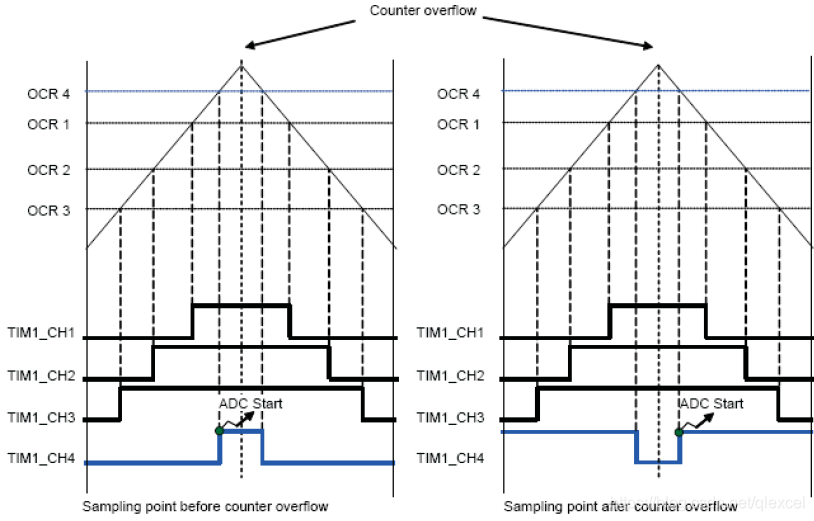
当然也可以使用TIM1的CH4来触发相电流采样,参数为TIM_TRGOSource_OC4Ref ,再打开CH4,并配置CH4的比较值,比如配置比较值为PWM_PERIOD-5。这样当CNT计数到PWM_PERIOD-5时就会触发相电流的ADC采样,这种方法比较灵活,可以合理设置CH4的比较值,来让相电流采样点避开开关噪声。
二、配置双ADC模式和规则组、注入组,其中注入组由TIM1的TRGO触发
//A相电流采样
#define PHASE_A_ADC_CHANNEL ADC_Channel_11
#define PHASE_A_GPIO_PORT GPIOC
#define PHASE_A_GPIO_PIN GPIO_Pin_1
//B相电流采样
#define PHASE_B_ADC_CHANNEL ADC_Channel_10
#define PHASE_B_GPIO_PORT GPIOC
#define PHASE_B_GPIO_PIN GPIO_Pin_0
//读取散热器温度(过热保护)
#define TEMP_FDBK_CHANNEL ADC_Channel_13
#define TEMP_FDBK_CHANNEL_GPIO_PORT GPIOC
#define TEMP_FDBK_CHANNEL_GPIO_PIN GPIO_Pin_3
//读取总线电压值(过压、欠压保护)
#define BUS_VOLT_FDBK_CHANNEL ADC_Channel_14
#define BUS_VOLT_FDBK_CHANNEL_GPIO_PORT GPIOC
#define BUS_VOLT_FDBK_CHANNEL_GPIO_PIN GPIO_Pin_4
//读取电位器值,可以用来调速等
#define POT1_VOLT_FDBK_CHANNEL ADC_Channel_12
#define POT1_VOLT_FDBK_CHANNEL_GPIO_PORT GPIOC
#define POT1_VOLT_FDBK_CHANNEL_GPIO_PIN GPIO_Pin_2
//读取母线电流值(过流保护)
#define BUS_SHUNT_CURR_CHANNEL ADC_Channel_15
#define BUS_SHUNT_CURR_CHANNEL_GPIO_PORT GPIOC
#define BUS_SHUNT_CURR_CHANNEL_GPIO_PIN GPIO_Pin_5
//读取刹车电阻电流(刹车电阻过流保护)
#define BRK_SHUNT_CURR_CHANNEL ADC_Channel_7
#define BRK_SHUNT_CURR_CHANNEL_GPIO_PORT GPIOA
#define BRK_SHUNT_CURR_CHANNEL_GPIO_PIN GPIO_Pin_7
//备用通道
#define AIN0_VOLT_FDBK_CHANNEL ADC_Channel_8
#define AIN0_VOLT_FDBK_CHANNEL_GPIO_PORT GPIOB
#define AIN0_VOLT_FDBK_CHANNEL_GPIO_PIN GPIO_Pin_0
//备用导通
#define AIN1_VOLT_FDBK_CHANNEL ADC_Channel_9
#define AIN1_VOLT_FDBK_CHANNEL_GPIO_PORT GPIOB
#define AIN1_VOLT_FDBK_CHANNEL_GPIO_PIN GPIO_Pin_1
#define ADC1_DR_Address ((uint32_t)0x4001244C) //ADC数据寄存器地址
#define BufferLenght 36
volatile u32 ADC_DualConvertedValueTab[BufferLenght];
volatile u16 ADC1_RegularConvertedValueTab[BufferLenght];
volatile u16 ADC2_RegularConvertedValueTab[BufferLenght];
static u16 hPhaseAOffset;
static u16 hPhaseBOffset;
void ADC_DMA_Init(void)
{
u8 bIndex;
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
DMA_InitTypeDef DMA_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //ADCCLK = PCLK2/6=72M/6=12MHz,ADC最大频率不能超过14MHz
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); //DMA1
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOA |
RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC | RCC_APB2Periph_GPIOE, ENABLE);
GPIO_StructInit(&GPIO_InitStructure); //Fills each GPIO_InitStruct member with its default value
GPIO_InitStructure.GPIO_Pin = PHASE_A_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(PHASE_A_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = PHASE_B_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(PHASE_B_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = TEMP_FDBK_CHANNEL_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(TEMP_FDBK_CHANNEL_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = BUS_VOLT_FDBK_CHANNEL_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(BUS_VOLT_FDBK_CHANNEL_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = POT1_VOLT_FDBK_CHANNEL_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(POT1_VOLT_FDBK_CHANNEL_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = BUS_SHUNT_CURR_CHANNEL_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(BUS_SHUNT_CURR_CHANNEL_GPIO_PORT, &GPIO_InitStructure);
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = BRK_SHUNT_CURR_CHANNEL_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(BRK_SHUNT_CURR_CHANNEL_GPIO_PORT, &GPIO_InitStructure);
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = AIN0_VOLT_FDBK_CHANNEL_GPIO_PIN | AIN1_VOLT_FDBK_CHANNEL_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(AIN0_VOLT_FDBK_CHANNEL_GPIO_PORT, &GPIO_InitStructure);
//设置DMA1,用于自动存储ADC1和ADC2规则通道的转换值
DMA_DeInit(DMA1_Channel1);
DMA_StructInit(&DMA_InitStructure);
DMA_InitStructure.DMA_PeripheralBaseAddr = ADC1_DR_Address; //ADC数据寄存器地址(源地址)
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)ADC_DualConvertedValueTab; //转换值存储地址(目标地址)
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //从外设到内存
DMA_InitStructure.DMA_BufferSize = BufferLenght; //传输大小
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外设地址不增
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //内存地址自增
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Word; //外设数据单位(每次传输32位)
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Word; //内存数据单位(每次传输32位)
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //循环模式
DMA_InitStructure.DMA_Priority = DMA_Priority_High; //本DMA通道优先级(用了多个通道时,本参数才有效果)
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //没有使用内存到内存的传输
DMA_Init(DMA1_Channel1, &DMA_InitStructure);
DMA_ClearITPendingBit(DMA1_IT_TC1); //清除通道1传输完成中断
DMA_ITConfig(DMA1_Channel1, DMA_IT_TC, ENABLE); //打开通道1传输完成中断
DMA_Cmd(DMA1_Channel1, ENABLE); //使能DMA1
/****使用双ADC模式,ADC1为主,ADC2为从。当ADC转换配置成由外部事件触发时,用户必须设置成仅触发主ADC,从ADC设置成软件触发,这样可以防止意外的触发从转换。
但是,主和从ADC的外部触发必须同时被激活,要调用 ADC_ExternalTrigConvCmd(ADC2, ENABLE);//ADC2外部触发使能****/
ADC_DeInit(ADC1);
ADC_DeInit(ADC2);
ADC_StructInit(&ADC_InitStructure);
ADC_InitStructure.ADC_Mode = ADC_Mode_RegInjecSimult; //ADC1工作在混合同步规则及注入模式
ADC_InitStructure.ADC_ScanConvMode = ENABLE; //轮流采集各个通道的值
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; //连续转换模式,触发后就会一直转换
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //转换触发信号选择,使用一个软件信号触发ADC1
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Left; //数据左对齐,ADC是12位,要存到DR寄存器的高16位或低16位,就有左右对齐问题,决定了高4位无效或低4位无效
ADC_InitStructure.ADC_NbrOfChannel = 3; //要进行ADC转换的通道数:BUS_SHUNT(母线电压)+BREAK_SHUNT(刹车电阻电流)+Chip Temp(MCU温度)
ADC_Init(ADC1, &ADC_InitStructure);
ADC_DMACmd(ADC1, ENABLE); //使能ADC1的DMA
ADC_StructInit(&ADC_InitStructure);
ADC_InitStructure.ADC_Mode = ADC_Mode_RegInjecSimult; //ADC2工作在混合同步规则及注入模式
ADC_InitStructure.ADC_ScanConvMode = ENABLE;
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; //连续转换模式,触发后就会一直转换
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //转换触发信号选择,由软件给信号触发,双ADC模式的从ADC必须设置为软件触发
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Left;
ADC_InitStructure.ADC_NbrOfChannel = 3; //要进行ADC转换的通道数:POT1(电位器)+AIN0(备用)+AIN1(备用)
ADC_Init(ADC2, &ADC_InitStructure);
ADC_ExternalTrigConvCmd(ADC2, ENABLE); //ADC2外部触发使能,双ADC模式的从ADC必须要用这条语句
ADC_RegularChannelConfig(ADC1, ADC_Channel_16, 1, ADC_SampleTime_239Cycles5); //MCU温度
ADC_RegularChannelConfig(ADC1, BRK_SHUNT_CURR_CHANNEL, 2, ADC_SampleTime_239Cycles5); //刹车电阻电流
ADC_RegularChannelConfig(ADC1, BUS_SHUNT_CURR_CHANNEL, 3, ADC_SampleTime_239Cycles5); //母线电流
ADC_RegularChannelConfig(ADC2, POT1_VOLT_FDBK_CHANNEL, 1, ADC_SampleTime_239Cycles5); //电位器
ADC_RegularChannelConfig(ADC2, AIN0_VOLT_FDBK_CHANNEL, 2, ADC_SampleTime_239Cycles5); //备用
ADC_RegularChannelConfig(ADC2, AIN1_VOLT_FDBK_CHANNEL, 3, ADC_SampleTime_239Cycles5); //备用
ADC_Cmd(ADC1, ENABLE); //ADC1使能
ADC_TempSensorVrefintCmd(ENABLE); //开启MCU内存温度传感器及Vref通道
ADC_ResetCalibration(ADC1); //复位校准寄存器
while(ADC_GetResetCalibrationStatus(ADC1)); //等待校准寄存器复位完成
ADC_StartCalibration(ADC1); //ADC1开始校准
while(ADC_GetCalibrationStatus(ADC1)); //等待校准完成
ADC_Cmd(ADC2, ENABLE); //ADC2使能
ADC_ResetCalibration(ADC2); //复位校准寄存器
while(ADC_GetResetCalibrationStatus(ADC2)); //等待校准寄存器复位完成
ADC_StartCalibration(ADC2); //ADC2开始校准
while(ADC_GetCalibrationStatus(ADC2)); //等待校准完成
/**** 获取A、B相零电流值,下面是临时配置 ****/
ADC_InjectedSequencerLengthConfig(ADC1,2); //设置ADC1注入组通道数量
ADC_ITConfig(ADC1, ADC_IT_JEOC, DISABLE); //关闭注入组转换完成中断
hPhaseAOffset=0; //A相零电流值
hPhaseBOffset=0; //B相零电流值
ADC_ExternalTrigInjectedConvConfig(ADC1, ADC_ExternalTrigInjecConv_None); //ADC1注入组转换的触发信号选择,注入组转换由软件触发
ADC_ExternalTrigInjectedConvCmd(ADC1,ENABLE); //使能外部信号触发注入组转换的功能
ADC_InjectedChannelConfig(ADC1, PHASE_A_ADC_CHANNEL,1,ADC_SampleTime_7Cycles5); //配置ADC1的注入组通道,设置它们的转化顺序和采样时间
ADC_InjectedChannelConfig(ADC1, PHASE_B_ADC_CHANNEL,2,ADC_SampleTime_7Cycles5); //A相电流和B相电流
ADC_ClearFlag(ADC1, ADC_FLAG_JEOC); //清除注入组转换完成中断标志
ADC_SoftwareStartInjectedConvCmd(ADC1,ENABLE); //给一个软件触发信号,开始注入组转换
for(bIndex=16; bIndex !=0; bIndex--)
{
while(!ADC_GetFlagStatus(ADC1,ADC_FLAG_JEOC)) { } //等待注入组转换完成
//求Q1.15格式的零电流值,16个(零电流值/8)的累加,把最高符号位溢出。
hPhaseAOffset += (ADC_GetInjectedConversionValue(ADC1,ADC_InjectedChannel_1)>>3); //注入组左对齐,数据要右移3位才是真实数据
hPhaseBOffset += (ADC_GetInjectedConversionValue(ADC1,ADC_InjectedChannel_2)>>3);
ADC_ClearFlag(ADC1, ADC_FLAG_JEOC); //清除注入组转换完成中断标志
ADC_SoftwareStartInjectedConvCmd(ADC1,ENABLE); //给一个软件触发信号,开始注入组转换
}
/**** 获取A、B相零电流值的临时配置使用结束,下面恢复ADC1的正常配置 ****/
ADC_InjectedChannelConfig(ADC1, PHASE_A_ADC_CHANNEL, 1, ADC_SampleTime_7Cycles5); //A相电流
ADC_InjectedChannelConfig(ADC1, BUS_VOLT_FDBK_CHANNEL,2, ADC_SampleTime_7Cycles5); //母线电压值
ADC_ExternalTrigInjectedConvConfig(ADC1, ADC_ExternalTrigInjecConv_T1_TRGO); //ADC1注入组转换的触发信号选择,注入组转换由TIM1的TRGO触发
ADC_ITConfig(ADC1, ADC_IT_JEOC, ENABLE); //这里才能打开注入组转换完成中断
ADC_InjectedSequencerLengthConfig(ADC2,2); //设置ADC2注入组通道数量
ADC_InjectedChannelConfig(ADC2, PHASE_B_ADC_CHANNEL, 1,ADC_SampleTime_7Cycles5); //B相电流
ADC_InjectedChannelConfig(ADC2, TEMP_FDBK_CHANNEL, 2,ADC_SampleTime_7Cycles5); //散热器温度
ADC_ExternalTrigInjectedConvCmd(ADC2,ENABLE); //使能外部信号触发注入组转换的功能
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //4个抢先级、4个子优先级
NVIC_InitStructure.NVIC_IRQChannel = ADC1_2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = DMA1_Channel1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
// ADC_ExternalTrigConvCmd(ADC1, ENABLE); //ADC1外部触发使能,如果ADC的触发信号是外部就要调用
// ADC_ExternalTrigConvCmd(ADC2, ENABLE); //ADC2外部触发使能
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //给主ADC一个软件触发信号,之后ADC就会一直转换下去
}
u16 h_ADCBusvolt;
u16 h_ADCTemp;
u16 h_ADCPhase_A;
u16 h_ADCPhase_B;
void ADC1_2_IRQHandler(void) //AD中断有三种情况:AD_EOC、AD_JEOC、AD_AWD
{
if((ADC1->SR & ADC_FLAG_JEOC) == ADC_FLAG_JEOC)
{
ADC1->SR = ~(u32)ADC_FLAG_JEOC; //清除注入组转换完成中断标志
//获取散热器温度和母线电压值,做出相应的处理
h_ADCTemp=ADC_GetInjectedConversionValue(ADC2,ADC_InjectedChannel_2); //散热器温度
h_ADCBusvolt=ADC_GetInjectedConversionValue(ADC1,ADC_InjectedChannel_2); //母线电压
//获取两相电流值,进行FOC运算
h_ADCPhase_A=ADC_GetInjectedConversionValue(ADC1,ADC_InjectedChannel_1); //散热器温度
h_ADCPhase_B=ADC_GetInjectedConversionValue(ADC2,ADC_InjectedChannel_1); //母线电压
}
}
void DMA1_Channel1_IRQHandler(void)
{
u8 i,j=0;
if(DMA_GetITStatus(DMA1_IT_TC1))
{
DMA_ClearITPendingBit(DMA1_IT_GL1); //清除DMA通道1传输完成中断
for(i=0;i<BufferLenght;i++)
{
ADC1_RegularConvertedValueTab[j++] = (uint16_t)(ADC_DualConvertedValueTab[i]>>4); //ADC1规则组左对齐,要右移4位
}
//ADC1_RegularConvertedValueTab[0]是MCU温度,ADC1_RegularConvertedValueTab[1]是刹车电阻电流,ADC1_RegularConvertedValueTab[2]是母线电流
j = 0;
for(i=0;i<BufferLenght;i++)
{
ADC2_RegularConvertedValueTab[j++] = (uint16_t)(ADC_DualConvertedValueTab[i] >> 20);//ADC2规则组左对齐,要右移20位
}
//ADC2_RegularConvertedValueTab[0]是电位器,ADC2_RegularConvertedValueTab[1]是备用,ADC2_RegularConvertedValueTab[2]是备用
}
}1、stm32的ADC转换速度为1MHz,精度为12位。采样时间可设置(1.5到239.5个周期),最小采样时间107ns。使用双ADC模式,同时触发ADC1、ADC2采集电机的两相电流,可保证采集到的两相电流值时间误差最小。配置ADC1为主,ADC2为从,用ADC1触发ADC2。
2、在众多的ADC采样通道中,A相、B相、母线电压值、散热器温度是对实时性要求比较高的,于是把他们配置成注入组通道,其余的配置成规则组。(注入组与规则组的关系和main中的while循环与中断类似,当注入组被触发时会打断规则组的ADC转换,优先转换注入组的通道,当注入组转换完成,规则组才继续转换)
3、在双ADC模式下,DR寄存器的高16位存储了ADC2的转换数据,低16位存储了ADC1的转换数据:

4、左右对齐的问题,ADC的转换精度只有12位,要保存的数据宽度为16位,因此存在靠左还是靠右的问题。
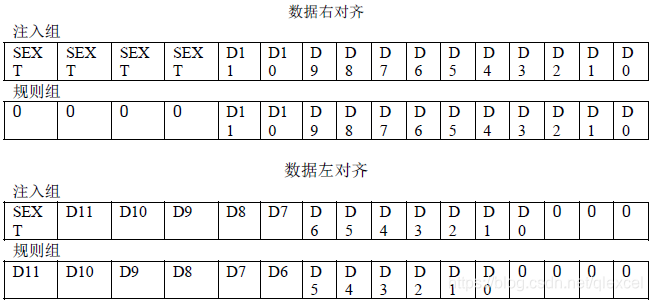
如上,注入组合规则组的左右对齐并不一样。推荐使用右对齐,直接取低12位即可。(上面的例程使用的左对齐,要做修改)
5、为了获取A、B相零电流时的值用于后面电机运行电流的矫正,先把注入组设置为软件触发,把零电流值采集完成后,再把配置修改成用TIM1的TRGO信号触发。因为是双ADC模式,只需要配置ADC1的触发信号就可以了。
6、求Q1.15格式的零电流值,16个(零电流值/8)的累加,把最高符号位溢出:
我们都知道MCU处理定点数会很快,处理浮点数比较慢,但是相电流采样值一般都比较小,会有小数,因此我们要使用Q格式来让浮点数据转化为定点数,提高处理速度。

因此我们上面使用的Q1.15格式(也称Q15),就是用15位来表示小数部分,最高位是符号位。浮点数转化为Q15,要将数据乘以2的15次方。Q15数据转化为浮点数,将数据除以2的15次方。
更多可以看这两篇文章:文章1 文章2 ,不想深究的,只需要导致浮点数和Q格式数的转换方法即可。
因此得到A、B相零电流的过程如下:
已知 :寄存器中的值/4096*Vref 是实际采样电阻上的电压值。hPhaseAOffset、hPhaseBOffset是16个零电流值的和。hPhaseAOffset、hPhaseBOffset是U16类型。
于是A相零电流的Q15格式值为:(hPhaseAOffset/16)/4096*Vref*2^15=(((hPhaseAOffset>>4)>>12)*Vref)<<15,当Vref=2V,A相零电流的Q15格式值就刚好等于hPhaseAOffset。为方便计算,那我们就统一Vref=2了。(在程序中,Vref取多少都没有关系,只要统一就行)
三、编码器的配置
#define U32_MAX ((u32)4294967295uL)
#define POLE_PAIR_NUM (u8)2 //电机的极对数
#define ENCODER_PPR (u16)(1000) //编码器线数,即转一圈,编码器输出的脉冲数
#define ALIGNMENT_ANGLE (u16)90 //上电时,电机转子的初始电角度,范围:0-359
#define COUNTER_RESET (u16)((((s32)(ALIGNMENT_ANGLE)*4*ENCODER_PPR/360)-1)/POLE_PAIR_NUM) //根据初始电角度计算TIM2_CNT值
#define ICx_FILTER (u8) 8 // 8<-> 670nsec
void ENC_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; //TIM2_CH1--PA0 TIM2_CH2--PA1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //设定浮空模式
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Enable the TIM2 Update Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_DeInit(TIM2);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; //No prescaling ,可以改变编码器计数对于脉冲输入个数的倍数
//即当TIM_Prescaler=0,输入一个脉冲,CNT增加4.当TIM_Prescaler=1,输入一个脉冲,CNT只增加2
TIM_TimeBaseStructure.TIM_Period = (4*ENCODER_PPR)-1; //ARR值,当CNT增加到ARR会溢出,产生更新中断
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM2,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising); //4倍计数,输入A、B信号不反相
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
TIM_ICInitStructure.TIM_ICFilter = ICx_FILTER; //滤波值是1-15,看情况设定,是用来滤除编码器信号干扰
TIM_ICInit(TIM2, &TIM_ICInitStructure); //配置通道1的滤波值
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;
TIM_ICInit(TIM2, &TIM_ICInitStructure); //配置通道2的滤波值
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM2->CNT = COUNTER_RESET; //设定电机转子初始电角度,一般电机校零后,掉电时要把电角度保存下来,再次上电时直接使用,就不用再校零了
TIM_Cmd(TIM2, ENABLE);
}
void TIM2_IRQHandler(void)
{
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
//TIM2->CNT向上溢出或向下溢出,都会触发此中断,即3999加一到0,或0减一到3999
}
/*******************************************************************************
* Description : 返回电机转子的电角度
* Return : Rotor electrical angle: 0 -> 0 degrees,
* S16_MAX-> 180 degrees,
* S16_MIN-> -180 degrees
*******************************************************************************/
s16 ENC_Get_Electrical_Angle(void)
{
s32 temp;
temp = (s32)(TIM_GetCounter(TIM2)) * (s32)(U32_MAX / (4*ENCODER_PPR));
temp *= POLE_PAIR_NUM;
return((s16)(temp/65536)); //s16 result
}1、定时器的编码器模式只用CH1、CH2,因此把编码器的A、B信号接在TIM2_CH1、TIM2_CH2即可。
2、编码器的模式选择TIM_EncoderMode_TI12,即TI1和TI2都要计数,用两张图就能说明白编码器模式的原理了:
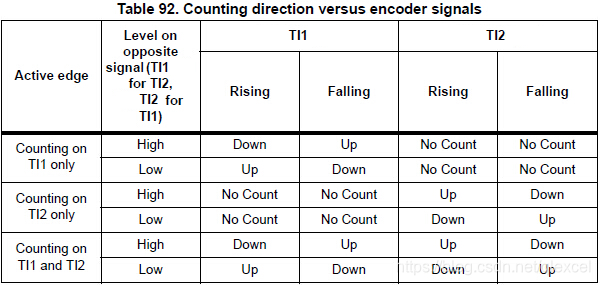
TI1和TI2对应了编码器的A、B信号,第一列是指编码器的3种模式,即只计数TI1、只计数TI2和都要计数。第二列是相对信号的电平,比如我们讨论TI1的边沿,它的相对信号就是TI2。
我们就可以来看了,首先看第二行,只计数TI1信号的模式。当它的相对信号(即TI2)是高电平时,如果TI1来一个上升沿,那么CNT就要向下计数(Down),如果来一个下降沿,那么CNT就要向上计数(Up)。示意图如下:
在时刻1,当TI2为低电平时,TI1来一个上升沿,CNT向上计数1.
在时刻3,当TI2为高电平时,TI1来一个下降沿,CNT又向上计数1.
同样的道理你也可以理解只计数TI2信号的模式,然后把这两个模式加起来你也可以理解同时计数TI1和TI2的模式。
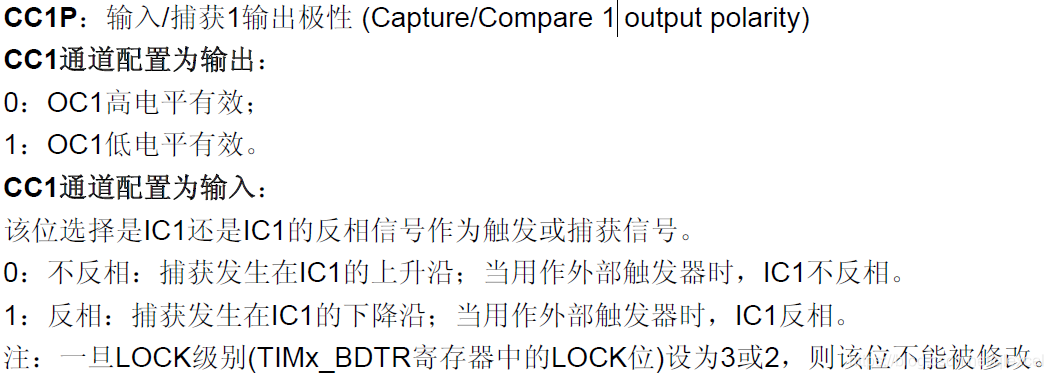
3、TIM_ICPolarity_Rising 表示极性不反相。TIM_ICPolarity_falling:表示极性反向。库函数中的配置代码是这样的:
/* Set the TI1 and the TI2 Polarities */
tmpccer &= (uint16_t)(((uint16_t)~((uint16_t)TIM_CCER_CC1P)) & ((uint16_t)~((uint16_t)TIM_CCER_CC2P)));
tmpccer |= (uint16_t)(TIM_IC1Polarity | (uint16_t)(TIM_IC2Polarity << (uint16_t)4));
/* Write to TIMx CCER */
TIMx->CCER = tmpccer;配置选项有3种:
#define TIM_ICPolarity_Rising ((uint16_t)0x0000)
#define TIM_ICPolarity_Falling ((uint16_t)0x0002)
#define TIM_ICPolarity_BothEdge ((uint16_t)0x000A)寄存器:

实际配置的是CC1P、CC1NP、CC2P、CC2NP位,改位描述如下:
4、ENC_Get_Electrical_Angle函数的问题
1)、首先是S16_MAX对应180度、S16_MIN对应-180的问题。这里其实就是利用了u32和s32数据类型表示的范围不同,而巧妙的产生了负数。我们知道u32的范围是:0到4294967295。而s32的范围是:-2147483648到2147483647。
(s32)(U32_MAX / (4*ENCODER_PPR))就是把4294967295分成4000份,如果CNT的值在0-2000,那么得到的结果最大也就是4294967295的一半,即2147483647,这时还没有超过s32的范围。当CNT=2001,得到2148555741,超过了s32范围,那么会怎么样呢?会从s32范围的最小值开始往上增加,就像一个环一样,最大值和最小值之间只差1。于是2148555741超出了2147483647:2148555741-2147483647=1072094,绕了一圈后得到:-2147483648+1072094-1=-2146411555。
有没有发现数据类型的这种特性和电机的电角度也是类似的?电机的电角度从0度增加到180度,然后再增加就变成-179度,又从-179度增加到0度,完成一圈。和数据类型的:从0增加到2147483647,再增加就变成-2147483648,又从-2147483648增加到0,完成一圈。
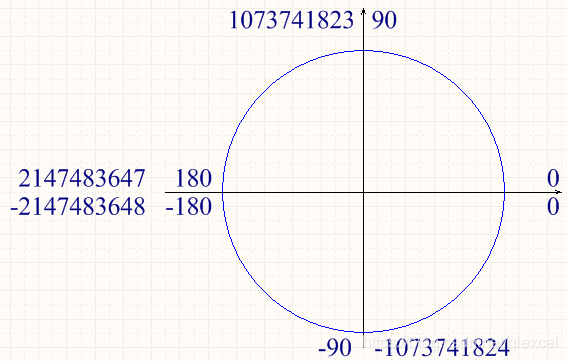
最后再把s32的数整除65536,就可以得到s16的数据类型了。(不能移位,会把符号位也移动了)
2)、极对数和电角度的关系
在函数还有一句:temp *= POLE_PAIR_NUM,即电角度要被极对数放大,这是为什么呢?
首先看极对数是什么:极对数是每相励磁绕组含有的磁极个数。
如果极对数是1,即每相只有一对磁极(一对磁极=2极,两对磁极=4极)
那么这3个相的磁极互差120度分布,相电流呈正弦规律变化一次,合成电压矢量旋转一圈,旋转磁场也会旋转一圈:
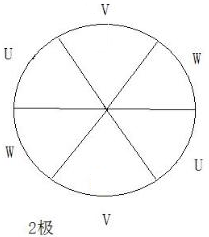
如果极对数是2,即每相有2对磁极:
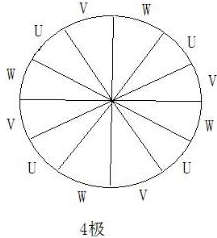
那么这3个相的磁极互差60度分布,相电流呈正弦规律变化一次,合成电压矢量旋转半圈,旋转磁场也旋转半圈:
(此处差一个gif。。。有没有谁知道上面那种gif怎么画的。。。)
因此SVPWM输入的电角度和电机转子的机械角度之间就有极对数的倍数关系了:
如果极对数是1,那么SVPWM输出的磁场旋转一圈,电机转子也旋转一圈,电角度和电机转子角度是一一对应的。
如果极对数是2,那么SVPWM输出的磁场旋转一圈,电机转子只旋转半圈,电角度是电机转子角度的2倍。
编码器的角度反映的是电机转子的机械角度。
后话:既然1对极电机就能转了,干嘛还要2对、4对呢?虽然极对数越多,转速越慢,但是扭矩可以越大。参考:https://toutiao.1688.com/article/1067976.htm
四、FOC相关变换的代码实现
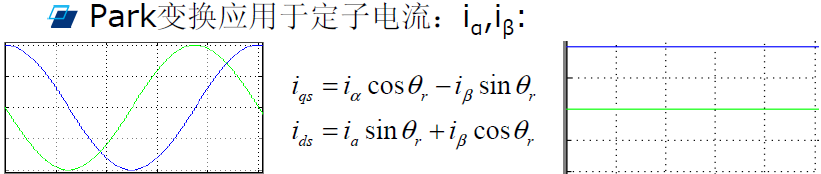
前面中的代码中我们用TIM1的TRGO信号触发ADC注入组的转换。然后ADC的注入组转换完成后会产生中断,然后在中断函数对相电流进行采样,再经过clark变换把Ia, Ib, Ic变换成Iα, Iβ,再经过park变换,把Iα, Iβ变换成Iq, Id。
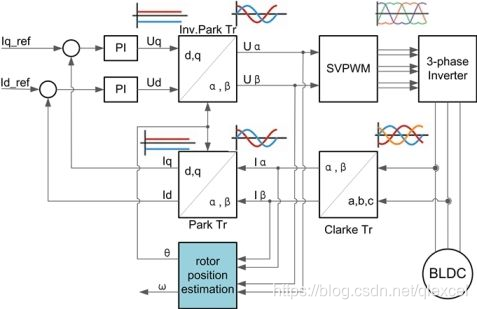
获取相电流采样值、clark变换、park变换、反park变换的函数如下:
typedef struct
{
s16 qI_Component1;
s16 qI_Component2;
} Curr_Components; //电流值结构体
typedef struct
{
s16 qV_Component1;
s16 qV_Component2;
} Volt_Components;
typedef struct //电压值结构体
{
s16 hCos;
s16 hSin;
} Trig_Components; //存放角度sin和cos函数值的结构体
#define S16_MAX ((s16)32767)
#define S16_MIN ((s16)-32768)
/**********************************************************************************************************
在注入组采样完成中断中调用,获取相电流的采样值。返回(电流采样值-零电流值),Q15格式
**********************************************************************************************************/
Curr_Components GET_PHASE_CURRENTS(void)
{
Curr_Components Local_Stator_Currents;
s32 wAux;
wAux = ((ADC1->JDR1)<<1)-(s32)(hPhaseAOffset); //把电流采样值转换为Q1.15格式,再减去零电流值
if (wAux < S16_MIN)
Local_Stator_Currents.qI_Component1= S16_MIN; //下限幅
else if (wAux > S16_MAX)
Local_Stator_Currents.qI_Component1= S16_MAX; //上限幅
else
Local_Stator_Currents.qI_Component1= wAux;
wAux = ((ADC2->JDR1)<<1)-(s32)(hPhaseBOffset); //B相电流
if (wAux < S16_MIN)
Local_Stator_Currents.qI_Component2= S16_MIN;
else if (wAux > S16_MAX)
Local_Stator_Currents.qI_Component2= S16_MAX;
else
Local_Stator_Currents.qI_Component2= wAux;
return(Local_Stator_Currents);
}
#define divSQRT_3 (s16)0x49E6 //1/sqrt(3)的Q15格式,1/sqrt(3)*2^15=18918=0x49E6
/**********************************************************************************************************
Clarke变换,输入Ia,Ib,得到Ialpha和Ibeta
**********************************************************************************************************/
Curr_Components Clarke(Curr_Components Curr_Input)
{
Curr_Components Curr_Output;
s32 qIa_divSQRT3_tmp;
s32 qIb_divSQRT3_tmp; //定义32位有符号数,用来暂存Q30格式
s16 qIa_divSQRT3;
s16 qIb_divSQRT3 ;
Curr_Output.qI_Component1 = Curr_Input.qI_Component1; //Ialpha = Ia
qIa_divSQRT3_tmp = divSQRT_3 * Curr_Input.qI_Component1; //计算Ia/√3
qIa_divSQRT3_tmp /=32768; //两个Q15数相乘,会变成Q30,因此要右移15位,变回Q15
qIb_divSQRT3_tmp = divSQRT_3 * Curr_Input.qI_Component2; //计算Ib/√3
qIb_divSQRT3_tmp /=32768;
qIa_divSQRT3=((s16)(qIa_divSQRT3_tmp)); //s32赋值给s16
qIb_divSQRT3=((s16)(qIb_divSQRT3_tmp));
Curr_Output.qI_Component2=(-(qIa_divSQRT3)-(qIb_divSQRT3)-(qIb_divSQRT3)); //Ibeta = -(2*Ib+Ia)/sqrt(3)
return(Curr_Output);
}
#define SIN_MASK 0x0300
#define U0_90 0x0200
#define U90_180 0x0300
#define U180_270 0x0000
#define U270_360 0x0100
const s16 hSin_Cos_Table[256] = {\
0x0000,0x00C9,0x0192,0x025B,0x0324,0x03ED,0x04B6,0x057F,\
0x0648,0x0711,0x07D9,0x08A2,0x096A,0x0A33,0x0AFB,0x0BC4,\
0x0C8C,0x0D54,0x0E1C,0x0EE3,0x0FAB,0x1072,0x113A,0x1201,\
0x12C8,0x138F,0x1455,0x151C,0x15E2,0x16A8,0x176E,0x1833,\
0x18F9,0x19BE,0x1A82,0x1B47,0x1C0B,0x1CCF,0x1D93,0x1E57,\
0x1F1A,0x1FDD,0x209F,0x2161,0x2223,0x22E5,0x23A6,0x2467,\
0x2528,0x25E8,0x26A8,0x2767,0x2826,0x28E5,0x29A3,0x2A61,\
0x2B1F,0x2BDC,0x2C99,0x2D55,0x2E11,0x2ECC,0x2F87,0x3041,\
0x30FB,0x31B5,0x326E,0x3326,0x33DF,0x3496,0x354D,0x3604,\
0x36BA,0x376F,0x3824,0x38D9,0x398C,0x3A40,0x3AF2,0x3BA5,\
0x3C56,0x3D07,0x3DB8,0x3E68,0x3F17,0x3FC5,0x4073,0x4121,\
0x41CE,0x427A,0x4325,0x43D0,0x447A,0x4524,0x45CD,0x4675,\
0x471C,0x47C3,0x4869,0x490F,0x49B4,0x4A58,0x4AFB,0x4B9D,\
0x4C3F,0x4CE0,0x4D81,0x4E20,0x4EBF,0x4F5D,0x4FFB,0x5097,\
0x5133,0x51CE,0x5268,0x5302,0x539B,0x5432,0x54C9,0x5560,\
0x55F5,0x568A,0x571D,0x57B0,0x5842,0x58D3,0x5964,0x59F3,\
0x5A82,0x5B0F,0x5B9C,0x5C28,0x5CB3,0x5D3E,0x5DC7,0x5E4F,\
0x5ED7,0x5F5D,0x5FE3,0x6068,0x60EB,0x616E,0x61F0,0x6271,\
0x62F1,0x6370,0x63EE,0x646C,0x64E8,0x6563,0x65DD,0x6656,\
0x66CF,0x6746,0x67BC,0x6832,0x68A6,0x6919,0x698B,0x69FD,\
0x6A6D,0x6ADC,0x6B4A,0x6BB7,0x6C23,0x6C8E,0x6CF8,0x6D61,\
0x6DC9,0x6E30,0x6E96,0x6EFB,0x6F5E,0x6FC1,0x7022,0x7083,\
0x70E2,0x7140,0x719D,0x71F9,0x7254,0x72AE,0x7307,0x735E,\
0x73B5,0x740A,0x745F,0x74B2,0x7504,0x7555,0x75A5,0x75F3,\
0x7641,0x768D,0x76D8,0x7722,0x776B,0x77B3,0x77FA,0x783F,\
0x7884,0x78C7,0x7909,0x794A,0x7989,0x79C8,0x7A05,0x7A41,\
0x7A7C,0x7AB6,0x7AEE,0x7B26,0x7B5C,0x7B91,0x7BC5,0x7BF8,\
0x7C29,0x7C59,0x7C88,0x7CB6,0x7CE3,0x7D0E,0x7D39,0x7D62,\
0x7D89,0x7DB0,0x7DD5,0x7DFA,0x7E1D,0x7E3E,0x7E5F,0x7E7E,\
0x7E9C,0x7EB9,0x7ED5,0x7EEF,0x7F09,0x7F21,0x7F37,0x7F4D,\
0x7F61,0x7F74,0x7F86,0x7F97,0x7FA6,0x7FB4,0x7FC1,0x7FCD,\
0x7FD8,0x7FE1,0x7FE9,0x7FF0,0x7FF5,0x7FF9,0x7FFD,0x7FFE};
/*******************************************************************************
* Function Name : Trig_Functions
* Description : 本函数返回输入角度的cos和sin函数值
* Input : angle in s16 format
* Output : Cosine and Sine in s16 format
*******************************************************************************/
Trig_Components Trig_Functions(s16 hAngle) //hAngle=0,转子电角度=0度。hAngle=S16_MAX,转子电角度=180度。hAngle=S16_MIN,转子电角度=-180度
{
u16 hindex;
Trig_Components Local_Components;
/* 10 bit index computation */
hindex = (u16)(hAngle + 32768);
hindex /= 64;
switch (hindex & SIN_MASK)
{
case U0_90:
Local_Components.hSin = hSin_Cos_Table[(u8)(hindex)];
Local_Components.hCos = hSin_Cos_Table[(u8)(0xFF-(u8)(hindex))];
break;
case U90_180:
Local_Components.hSin = hSin_Cos_Table[(u8)(0xFF-(u8)(hindex))];
Local_Components.hCos = -hSin_Cos_Table[(u8)(hindex)];
break;
case U180_270:
Local_Components.hSin = -hSin_Cos_Table[(u8)(hindex)];
Local_Components.hCos = -hSin_Cos_Table[(u8)(0xFF-(u8)(hindex))];
break;
case U270_360:
Local_Components.hSin = -hSin_Cos_Table[(u8)(0xFF-(u8)(hindex))];
Local_Components.hCos = hSin_Cos_Table[(u8)(hindex)];
break;
default:
break;
}
return (Local_Components);
}
Trig_Components Vector_Components;
/**********************************************************************************************************
Park变换,输入电角度、Ialpha和Ibeta,经过Park变换得到Iq、Id
**********************************************************************************************************/
Curr_Components Park(Curr_Components Curr_Input, s16 Theta)
{
Curr_Components Curr_Output;
s32 qId_tmp_1, qId_tmp_2;
s32 qIq_tmp_1, qIq_tmp_2;
s16 qId_1, qId_2;
s16 qIq_1, qIq_2;
Vector_Components = Trig_Functions(Theta); //计算电角度的cos和sin
qIq_tmp_1 = Curr_Input.qI_Component1 * Vector_Components.hCos; //计算Ialpha*cosθ
qIq_tmp_1 /= 32768;
qIq_tmp_2 = Curr_Input.qI_Component2 *Vector_Components.hSin; //计算Ibeta*sinθ
qIq_tmp_2 /= 32768;
qIq_1 = ((s16)(qIq_tmp_1));
qIq_2 = ((s16)(qIq_tmp_2));
Curr_Output.qI_Component1 = ((qIq_1)-(qIq_2)); //Iq=Ialpha*cosθ- Ibeta*sinθ
qId_tmp_1 = Curr_Input.qI_Component1 * Vector_Components.hSin; //计算Ialpha*sinθ
qId_tmp_1 /= 32768;
qId_tmp_2 = Curr_Input.qI_Component2 * Vector_Components.hCos; //计算Ibeta*cosθ
qId_tmp_2 /= 32768;
qId_1 = (s16)(qId_tmp_1);
qId_2 = (s16)(qId_tmp_2);
Curr_Output.qI_Component2 = ((qId_1)+(qId_2)); //Id=Ialpha*sinθ+ Ibeta*cosθ
return (Curr_Output);
}
/**********************************************************************************************************
反park变换,输入Uq、Ud得到Ualpha、Ubeta
**********************************************************************************************************/
Volt_Components Rev_Park(Volt_Components Volt_Input)
{
s32 qValpha_tmp1,qValpha_tmp2,qVbeta_tmp1,qVbeta_tmp2;
s16 qValpha_1,qValpha_2,qVbeta_1,qVbeta_2;
Volt_Components Volt_Output;
qValpha_tmp1 = Volt_Input.qV_Component1 * Vector_Components.hCos; //Uq*cosθ
qValpha_tmp1 /= 32768;
qValpha_tmp2 = Volt_Input.qV_Component2 * Vector_Components.hSin; //Ud*sinθ
qValpha_tmp2 /= 32768;
qValpha_1 = (s16)(qValpha_tmp1);
qValpha_2 = (s16)(qValpha_tmp2);
Volt_Output.qV_Component1 = ((qValpha_1)+(qValpha_2)); //Ualpha=Uq*cosθ+ Ud*sinθ
qVbeta_tmp1 = Volt_Input.qV_Component1 * Vector_Components.hSin; //Uq*sinθ
qVbeta_tmp1 /= 32768;
qVbeta_tmp2 = Volt_Input.qV_Component2 * Vector_Components.hCos; //Ud*cosθ
qVbeta_tmp2 /= 32768;
qVbeta_1 = (s16)(qVbeta_tmp1);
qVbeta_2 = (s16)(qVbeta_tmp2);
Volt_Output.qV_Component2 = -(qVbeta_1)+(qVbeta_2); //Ubeta=Ud*cosθ- Uq*sinθ
return(Volt_Output);
}1、读取ADC注入组的转换值:ADC1->JDR1和ADC2->JDR1。数据的对齐还是满足下表的关系:
我们是注入组左对齐,因此右移3位才是真实的转换值。电流采样值的Q15格式为:((ADC1->JDR1<<1)>>4)/4096*Vref*2^15=((((ADC1->JDR1<<1)>>4)>>12)*Vref)<<15=ADC1->JDR1<<1.
2、用ADC采集电机的两相电流,即可通过Ia+Ib+Ic=0得到第三相的电流。电机的三相电流是在时间上互差120度,成正弦规律变化的波形。电流波形如下:
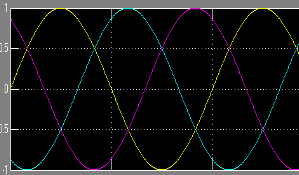
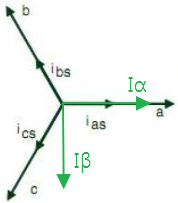
表示为矢量:

我们通过clark变换,把Ia、Ib、Ic变换为Iα、Iβ:
变换公式:(可以当成矢量分解来理解)
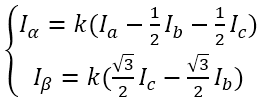
公式中有一个系数k,一般取2/3。有兴趣可以去这儿了解:https://blog.csdn.net/daidi1989/article/details/89926324。带入2/3:
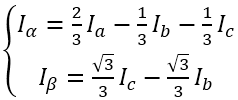
再代入Ia+Ib+Ic=0:
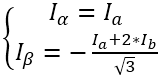

注:ST的FOC库,采用的Iβ轴(即虚轴)滞后Iα90度的表示方法。与其他地方说的Iβ提前Iα90度是一样的效果。只是表示方法不同而已,选择了这种表示方法,后面的park变换也和提前90度的不同。
3、Trig_Functions函数,使用查表的方法计算目标角度的三角函数。速度快,精度也还可以,读者可以自己测试一下精度。
4、使用park变换将电流 Iα、Iβ 和转子的电角度θ转化为电流 Iq、Id。
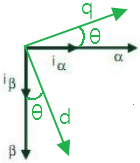
公式为:
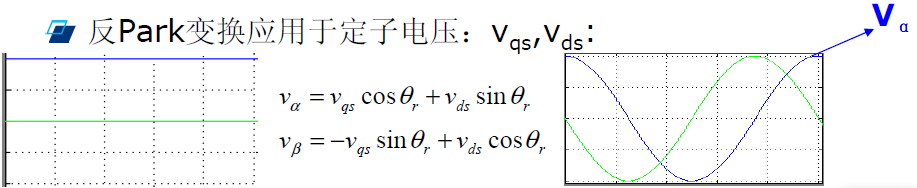
5、反park变换就是上面park变换的逆过程,公式就不推了。
五、PID控制
typedef struct
{
s16 hKp_Gain; //比例系数
u16 hKp_Divisor; //比例系数因子
s16 hKi_Gain; //积分系数
u16 hKi_Divisor; //积分系数因子
s16 hLower_Limit_Output; //总输出下限
s16 hUpper_Limit_Output; //总输出上限
s32 wLower_Limit_Integral; //积分项下限
s32 wUpper_Limit_Integral; //积分项上限
s32 wIntegral; //积分累积和
s16 hKd_Gain; //微分系数
u16 hKd_Divisor; //微分系数因子
s32 wPreviousError; //上次误差
} PID_Struct_t;
/****************************** 扭矩的PID参数,即q轴 *******************************************************/
#define PID_TORQUE_REFERENCE (s16)3000 //q轴的设定值,PID的目的就是要让测量的q轴值与设定值误差为0
#define PID_TORQUE_KP_DEFAULT (s16)1578 //Kp默认值
#define PID_TORQUE_KI_DEFAULT (s16)676 //Ki默认值
#define PID_TORQUE_KD_DEFAULT (s16)100 //Kd默认值
/****************************** 转子磁通的PID参数,即d轴 *******************************************************/
#define PID_FLUX_REFERENCE (s16)0 //d轴的设定值
#define PID_FLUX_KP_DEFAULT (s16)1578
#define PID_FLUX_KI_DEFAULT (s16)676
#define PID_FLUX_KD_DEFAULT (s16)100
/****************************** q轴和d轴PID参数的放大倍数 *******************************************************/
#define TF_KPDIV ((u16)(1024)) //因为Kp、Ki、Kd值很小,而我们需要整数计算,所以需要放大。得出计算结果之后,再缩小。
#define TF_KIDIV ((u16)(16384))
#define TF_KDDIV ((u16)(8192))
/****************************** 速度环的PID参数 *******************************************************/
#define PID_SPEED_REFERENCE_RPM (s16)1500 //电机的设定转速
#define PID_SPEED_REFERENCE (u16)(PID_SPEED_REFERENCE_RPM/6) //电机转速和速度环的设定值一般都不相等,电机不同,它们的关系也不同
#define PID_SPEED_KP_DEFAULT (s16)300
#define PID_SPEED_KI_DEFAULT (s16)100
#define PID_SPEED_KD_DEFAULT (s16)0000
#define NOMINAL_CURRENT (s16)5289 //motor nominal current (0-pk),3倍的额定电流
#define IQMAX NOMINAL_CURRENT //速度环输出最大值
/****************************** 速度环PID参数的放大倍数 *******************************************************/
#define SP_KPDIV ((u16)(16))
#define SP_KIDIV ((u16)(256))
#define SP_KDDIV ((u16)(16))
volatile s16 hTorque_Reference; //q轴设定值
volatile s16 hFlux_Reference; //d轴设定值
volatile s16 hSpeed_Reference; //速度环设定值
void PID_Init (PID_Struct_t *PID_Torque, PID_Struct_t *PID_Flux, PID_Struct_t *PID_Speed)
{
hTorque_Reference = PID_TORQUE_REFERENCE; //q轴设定值初始化
/******************************************* 下面是控制扭矩的PID参数,即q轴大小 **************************************************************/
PID_Torque->hKp_Gain = PID_TORQUE_KP_DEFAULT; //Kp参数,放大了hKp_Divisor倍。调节结果除以hKp_Divisor才是真实结果
PID_Torque->hKp_Divisor = TF_KPDIV; //Kp参数分数因子
PID_Torque->hKi_Gain = PID_TORQUE_KI_DEFAULT; //Ki参数
PID_Torque->hKi_Divisor = TF_KIDIV; //Ki参数分数因子
PID_Torque->hKd_Gain = PID_TORQUE_KD_DEFAULT; //Kd参数
PID_Torque->hKd_Divisor = TF_KDDIV; //Kd参数分数因子
PID_Torque->wPreviousError = 0; //上次计算的误差值,用于D调节
PID_Torque->hLower_Limit_Output=S16_MIN; //PID输出下限幅
PID_Torque->hUpper_Limit_Output= S16_MAX; //PID输出上限幅
PID_Torque->wLower_Limit_Integral = S16_MIN * TF_KIDIV; //I调节的下限福
PID_Torque->wUpper_Limit_Integral = S16_MAX * TF_KIDIV; //I调节的上限幅
PID_Torque->wIntegral = 0; //I调节的结果,因为是积分,所以要一直累积
/******************************************* 上面是控制扭矩的PID参数,即q轴大小 **************************************************************/
hFlux_Reference = PID_FLUX_REFERENCE; //对于SM-PMSM电机,Id = 0
/******************************************* 下面是控制转子磁通的PID参数,即d轴大小 **************************************************************/
PID_Flux->hKp_Gain = PID_FLUX_KP_DEFAULT;
PID_Flux->hKp_Divisor = TF_KPDIV;
PID_Flux->hKi_Gain = PID_FLUX_KI_DEFAULT;
PID_Flux->hKi_Divisor = TF_KIDIV;
PID_Flux->hKd_Gain = PID_FLUX_KD_DEFAULT;
PID_Flux->hKd_Divisor = TF_KDDIV;
PID_Flux->wPreviousError = 0;
PID_Flux->hLower_Limit_Output=S16_MIN;
PID_Flux->hUpper_Limit_Output= S16_MAX;
PID_Flux->wLower_Limit_Integral = S16_MIN * TF_KIDIV;
PID_Flux->wUpper_Limit_Integral = S16_MAX * TF_KIDIV;
PID_Flux->wIntegral = 0;
/******************************************* 上面是控制转子磁通的PID参数,即d轴大小 **************************************************************/
hSpeed_Reference = PID_SPEED_REFERENCE;
/******************************************* 下面是速度环的PID参数 **************************************************************/
PID_Speed->hKp_Gain = PID_SPEED_KP_DEFAULT;
PID_Speed->hKp_Divisor = SP_KPDIV;
PID_Speed->hKi_Gain = PID_SPEED_KI_DEFAULT;
PID_Speed->hKi_Divisor = SP_KIDIV;
PID_Speed->hKd_Gain = PID_SPEED_KD_DEFAULT;
PID_Speed->hKd_Divisor = SP_KDDIV;
PID_Speed->wPreviousError = 0;
PID_Speed->hLower_Limit_Output= -IQMAX;
PID_Speed->hUpper_Limit_Output= IQMAX;
PID_Speed->wLower_Limit_Integral = -IQMAX * SP_KIDIV;
PID_Speed->wUpper_Limit_Integral = IQMAX * SP_KIDIV;
PID_Speed->wIntegral = 0;
/******************************************* 上面是速度环的PID参数 **************************************************************/
}
//#define DIFFERENTIAL_TERM_ENABLED //不使用PID的D调节
typedef signed long long s64;
s16 PID_Regulator(s16 hReference, s16 hPresentFeedback, PID_Struct_t *PID_Struct)
{
s32 wError, wProportional_Term,wIntegral_Term, houtput_32;
s64 dwAux;
#ifdef DIFFERENTIAL_TERM_ENABLED //如果使能了D调节
s32 wDifferential_Term;
#endif
wError= (s32)(hReference - hPresentFeedback); //设定值-反馈值,取得需要误差量delta_e
wProportional_Term = PID_Struct->hKp_Gain * wError; //PID的P调节,即比例放大调节:wP = Kp * delta_e
if (PID_Struct->hKi_Gain == 0) //下面进行PID的I调节,即误差的累积调节
{
PID_Struct->wIntegral = 0; //如果I参数=0,I调节就=0
}
else
{
wIntegral_Term = PID_Struct->hKi_Gain * wError; //wI = Ki * delta_e ,本次积分项
dwAux = PID_Struct->wIntegral + (s64)(wIntegral_Term); //积分累积的调节量 = 以前的积分累积量 + 本次的积分项
if (dwAux > PID_Struct->wUpper_Limit_Integral) //对PID的I调节做限幅
{
PID_Struct->wIntegral = PID_Struct->wUpper_Limit_Integral; //上限
}
else if (dwAux < PID_Struct->wLower_Limit_Integral) //下限
{
PID_Struct->wIntegral = PID_Struct->wLower_Limit_Integral;
}
else
{
PID_Struct->wIntegral = (s32)(dwAux); //不超限, 更新积分累积项为dwAux
}
}
#ifdef DIFFERENTIAL_TERM_ENABLED //如果使能了D调节
{
s32 wtemp;
wtemp = wError - PID_Struct->wPreviousError; //取得上次和这次的误差之差
wDifferential_Term = PID_Struct->hKd_Gain * wtemp; //D调节结果,wD = Kd * delta_d
PID_Struct->wPreviousError = wError; //更新上次误差,用于下次运算
}
houtput_32 = (wProportional_Term/PID_Struct->hKp_Divisor+ //输出总的调节量 = 比例调节量/分数因子 +
PID_Struct->wIntegral/PID_Struct->hKi_Divisor + // + 积分调节量/分数因子
wDifferential_Term/PID_Struct->hKd_Divisor); // + 微分调节量/分数因子
#else
//把P调节和I调节结果除以分数因子再相加,得到PI控制的结果
houtput_32 = (wProportional_Term/PID_Struct->hKp_Divisor + PID_Struct->wIntegral/PID_Struct->hKi_Divisor);
#endif
if (houtput_32 >= PID_Struct->hUpper_Limit_Output) //PI控制结果限幅
{
return(PID_Struct->hUpper_Limit_Output);
}
else if (houtput_32 < PID_Struct->hLower_Limit_Output) //下限
{
return(PID_Struct->hLower_Limit_Output);
}
else
{
return((s16)(houtput_32)); //不超限。输出结果 houtput_32
}
}PID控制没什么好说的,网上资料很多。此处用的PID也很普通,很容易看懂。
使用了宏定义,选择是否使用PID的D调节。一般PI控制就已经足够。
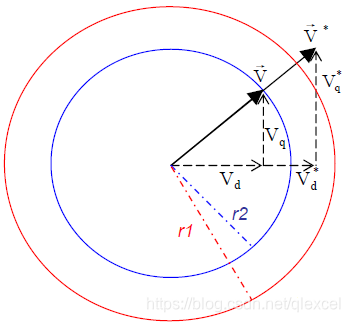
6、使用RevPark_Circle_Limitation函数对PID的输出进行归一化
看下面的FOC的处理过程:
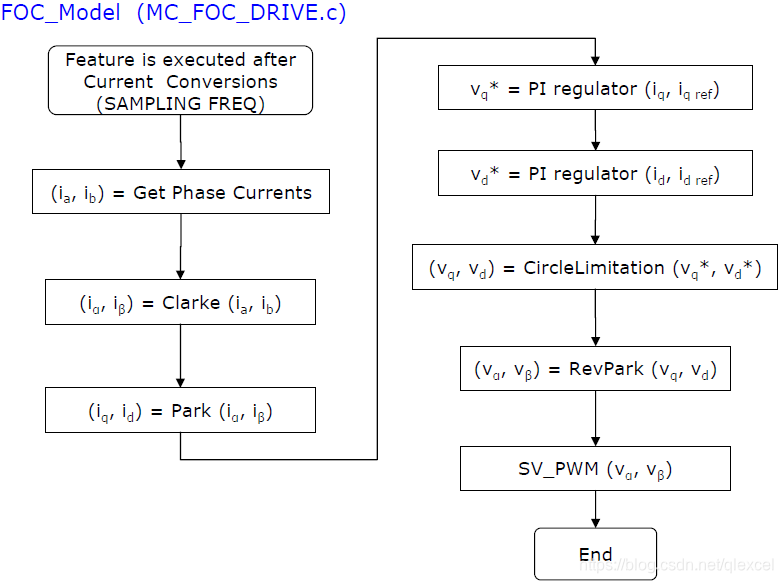
可以发现在PID计算后,要进行CircleLimitation处理,为什么呢?因为我们需要控制旋转磁场大小的恒定,如果d、q轴给得太大了,那么输出的旋转磁场就会过调制,圆形磁场就会凸起来一块。PID控制器只能对单独的d、q轴大小进行限制,可是它控制不了d、q轴合成矢量的大小。比如:最大值要求限制在1,d=0.8,q=0.9,他们各自的大小都没有超过1,可是它们的合成矢量大小却超过了1。示意图如下,就是要用比例关系,把外圆上的d、q值等比例缩小到内圆上:
/**** 根据载波频率来选择调制系数,频率越大,调制系数越小(实质是控制的最大占空比) ****/
//#define MAX_MODULATION_100_PER_CENT // up to 11.4 kHz PWM frequency
//#define MAX_MODULATION_99_PER_CENT // up to 11.8 kHz
//#define MAX_MODULATION_98_PER_CENT // up to 12.2 kHz
//#define MAX_MODULATION_97_PER_CENT // up to 12.9 kHz
//#define MAX_MODULATION_96_PER_CENT // up to 14.4 kHz
#define MAX_MODULATION_95_PER_CENT // up to 14.8 kHz
//#define MAX_MODULATION_94_PER_CENT // up to 15.2 kHz
//#define MAX_MODULATION_93_PER_CENT // up to 16.7 kHz
//#define MAX_MODULATION_92_PER_CENT // up to 17.1 kHz
//#define MAX_MODULATION_89_PER_CENT // up to 17.5 kHz
/**** 以下是根据选择的调制系数,计算d、q轴合成矢量模的最大值。用宏定义,优化计算速度 ****/
#ifdef MAX_MODULATION_77_PER_CENT
#define MAX_MODULE 25230 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*77%
#endif
#ifdef MAX_MODULATION_79_PER_CENT
#define MAX_MODULE 25885 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*79%
#endif
#ifdef MAX_MODULATION_81_PER_CENT
#define MAX_MODULE 26541 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*81%
#endif
#ifdef MAX_MODULATION_83_PER_CENT
#define MAX_MODULE 27196 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*83%
#endif
#ifdef MAX_MODULATION_85_PER_CENT
#define MAX_MODULE 27851 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*85%
#endif
#ifdef MAX_MODULATION_87_PER_CENT
#define MAX_MODULE 28507 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*87%
#endif
#ifdef MAX_MODULATION_89_PER_CENT
#define MAX_MODULE 29162 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*89%
#endif
#ifdef MAX_MODULATION_91_PER_CENT
#define MAX_MODULE 29817 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*91%
#endif
#ifdef MAX_MODULATION_92_PER_CENT
#define MAX_MODULE 30145 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*92%
#endif
#ifdef MAX_MODULATION_93_PER_CENT
#define MAX_MODULE 30473 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*93%
#endif
#ifdef MAX_MODULATION_94_PER_CENT
#define MAX_MODULE 30800 //root(Vd^2+Vq^2) <= MAX_MODULE = 32767*94%
#endif
#ifdef MAX_MODULATION_95_PER_CENT
#define MAX_MODULE 31128 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*95%
#endif
#ifdef MAX_MODULATION_96_PER_CENT
#define MAX_MODULE 31456 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*96%
#endif
#ifdef MAX_MODULATION_97_PER_CENT
#define MAX_MODULE 31783 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*97%
#endif
#ifdef MAX_MODULATION_98_PER_CENT
#define MAX_MODULE 32111 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*98%
#endif
#ifdef MAX_MODULATION_99_PER_CENT
#define MAX_MODULE 32439 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*99%
#endif
#ifdef MAX_MODULATION_100_PER_CENT
#define MAX_MODULE 32767 // root(Vd^2+Vq^2) <= MAX_MODULE = 32767*100%
#endif
#ifdef MAX_MODULATION_77_PER_CENT
#define START_INDEX 37
static const u16 circle_limit_table[91]=
{
32468,32176,31893,31347,31084,30578,30334,29863,29636,29414,28984,28776,28373,
28178,27987,27616,27436,27086,26916,26585,26425,26267,25959,25809,25518,25375,
25098,24962,24829,24569,24442,24194,24072,23953,23719,23604,23381,23271,23056,
22951,22848,22644,22545,22349,22254,22066,21974,21883,21704,21616,21444,21359,
21275,21111,21030,20872,20793,20640,20564,20490,20343,20270,20128,20058,19920,
19852,19785,19653,19587,19459,19396,19271,19209,19148,19028,18969,18852,18795,
18738,18625,18570,18460,18406,18299,18246,18194,18091,18040,17940,17890,17792
};
#endif
#ifdef MAX_MODULATION_79_PER_CENT
#define START_INDEX 39
static const u16 circle_limit_table[89]=
{
32489,32217,31952,31442,31195,30719,30489,30045,29830,29413,29211,28819,28629,
28442,28080,27904,27562,27396,27072,26914,26607,26457,26165,26022,25882,25608,
25475,25214,25086,24836,24715,24476,24359,24130,24019,23908,23692,23586,23378,
23276,23077,22979,22787,22692,22507,22416,22326,22150,22063,21893,21809,21645,
21564,21405,21327,21173,21097,21022,20875,20802,20659,20589,20450,20382,20247,
20181,20051,19986,19923,19797,19735,19613,19553,19434,19375,19260,19202,19090,
19034,18979,18871,18817,18711,18659,18555,18504,18403,18354,18255
};
#endif
#ifdef MAX_MODULATION_81_PER_CENT
#define START_INDEX 41
static const u16 circle_limit_table[87]=
{
32508,32255,32008,31530,31299,30852,30636,30216,30012,29617,29426,29053,28872,
28520,28349,28015,27853,27536,27382,27081,26934,26647,26507,26234,26101,25840,
25712,25462,25340,25101,24984,24755,24643,24422,24315,24103,24000,23796,23696,
23500,23404,23216,23123,22941,22851,22763,22589,22504,22336,22253,22091,22011,
21854,21776,21624,21549,21401,21329,21186,21115,20976,20908,20773,20706,20575,
20511,20383,20320,20196,20135,20015,19955,19838,19780,19666,19609,19498,19443,
19334,19280,19175,19122,19019,18968,18867,18817,18719
};
#endif
#ifdef MAX_MODULATION_83_PER_CENT
#define START_INDEX 44
static const u16 circle_limit_table[84]=
{
32291,32060,31613,31397,30977,30573,30377,29996,29811,29451,29276,28934,28768,
28444,28286,27978,27827,27533,27390,27110,26973,26705,26574,26318,26069,25948,
25709,25592,25363,25251,25031,24923,24711,24607,24404,24304,24107,24011,23821,
23728,23545,23456,23279,23192,23021,22854,22772,22610,22530,22374,22297,22145,
22070,21922,21850,21707,21636,21497,21429,21294,21227,21096,21032,20904,20778,
20717,20595,20534,20416,20357,20241,20184,20071,20015,19905,19851,19743,19690,
19585,19533,19431,19380,19280,19182
};
#endif
#ifdef MAX_MODULATION_85_PER_CENT
#define START_INDEX 46
static const u16 circle_limit_table[82]=
{
32324,32109,31691,31489,31094,30715,30530,30170,29995,29654,29488,29163,29005,
28696,28397,28250,27965,27825,27552,27418,27157,26903,26779,26535,26416,26182,
26067,25842,25623,25515,25304,25201,24997,24897,24701,24605,24415,24230,24139,
23960,23872,23699,23614,23446,23282,23201,23042,22964,22810,22734,22584,22437,
22365,22223,22152,22014,21945,21811,21678,21613,21484,21421,21296,21234,21112,
21051,20932,20815,20757,20643,20587,20476,20421,20312,20205,20152,20048,19996
,19894,19844,19744,19645
};
#endif
#ifdef MAX_MODULATION_87_PER_CENT
#define START_INDEX 48
static const u16 circle_limit_table[81]=
{
32559,32154,31764,31575,31205,31025,30674,30335,30170,29847,
29689,29381,29083,28937,28652,28375,28239,27974,27844,27589,
27342,27220,26983,26866,26637,26414,26305,26090,25984,25777,
25575,25476,25280,25184,24996,24811,24720,24542,24367,24281,
24112,24028,23864,23703,23624,23468,23391,23240,23091,23018,
22874,22803,22662,22524,22456,22322,22191,22126,21997,21934,
21809,21686,21625,21505,21446,21329,21214,21157,21045,20990,
20880,20772,20719,20613,20561,20458,20356,20306,20207,20158,
20109
};
#endif
#ifdef MAX_MODULATION_89_PER_CENT
#define START_INDEX 50
static const u16 circle_limit_table[78]=
{
32574,32197,32014,31656,31309,31141,30811,30491,30335,30030,
29734,29589,29306,29031,28896,28632,28375,28249,28002,27881,
27644,27412,27299,27076,26858,26751,26541,26336,26235,26037,
25844,25748,25561,25378,25288,25110,24936,24851,24682,24517,
24435,24275,24118,24041,23888,23738,23664,23518,23447,23305,
23166,23097,22962,22828,22763,22633,22505,22442,22318,22196,
22135,22016,21898,21840,21726,21613,21557,21447,21338,21284,
21178,21074,21022,20919,20819,20769,20670,20573
};
#endif
#ifdef MAX_MODULATION_91_PER_CENT
#define START_INDEX 52
static const u16 circle_limit_table[76]=
{
32588,32411,32066,31732,31569,31250,30940,30789,30492,30205,
29925,29788,29519,29258,29130,28879,28634,28395,28278,28048,
27823,27713,27497,27285,27181,26977,26777,26581,26485,26296,
26110,26019,25840,25664,25492,25407,25239,25076,24995,24835,
24679,24602,24450,24301,24155,24082,23940,23800,23731,23594,
23460,23328,23263,23135,23008,22946,22822,22701,22641,22522,
22406,22291,22234,22122,22011,21956,21848,21741,21636,21584,
21482,21380,21330,21231,21133,21037
};
#endif
#ifdef MAX_MODULATION_92_PER_CENT
#define START_INDEX 54
const u16 circle_limit_table[74]=
{
32424,32091,31929,31611,31302,31002,30855,30568,30289,30017,
29884,29622,29368,29243,28998,28759,28526,28412,28187,27968,
27753,27648,27441,27238,27040,26942,26750,26563,26470,26288,
26110,25935,25849,25679,25513,25350,25269,25111,24955,24803,
24727,24579,24433,24361,24219,24079,23942,23874,23740,23609,
23479,23415,23289,23165,23042,22982,22863,22745,22629,22572,
22459,22347,22292,22183,22075,21970,21917,21813,21711,21610,
21561,21462,21365,21268
};
#endif
#ifdef MAX_MODULATION_93_PER_CENT
#define START_INDEX 55
const u16 circle_limit_table[73]=
{
32437,32275,31959,31651,31353,31207,30920,30642,30371,30107,
29977,29723,29476,29234,29116,28883,28655,28433,28324,28110,
27900,27695,27594,27395,27201,27011,26917,26733,26552,26375,
26202,26116,25948,25783,25621,25541,25383,25228,25076,25001,
24854,24708,24565,24495,24356,24219,24084,24018,23887,23758,
23631,23506,23444,23322,23202,23083,23025,22909,22795,22683,
22627,22517,22409,22302,22250,22145,22042,21941,21890,21791,
21693,21596,21500
};
#endif
#ifdef MAX_MODULATION_94_PER_CENT
#define START_INDEX 56
const u16 circle_limit_table[72]=
{
32607,32293,31988,31691,31546,31261,30984,30714,30451,30322,
30069,29822,29581,29346,29231,29004,28782,28565,28353,28249,
28044,27843,27647,27455,27360,27174,26991,26812,26724,26550,
26380,26213,26049,25968,25808,25652,25498,25347,25272,25125,
24981,24839,24699,24630,24494,24360,24228,24098,24034,23908,
23783,23660,23600,23480,23361,23245,23131,23074,22962,22851,
22742,22635,22582,22477,22373,22271,22170,22120,22021,21924,
21827,21732
};
#endif
#ifdef MAX_MODULATION_95_PER_CENT
#define START_INDEX 57
const u16 circle_limit_table[71]=
{
32613,32310,32016,31872,31589,31314,31046,30784,30529,30404,
30158,29919,29684,29456,29343,29122,28906,28695,28488,28285,
28186,27990,27798,27610,27425,27245,27155,26980,26808,26639,
26473,26392,26230,26072,25917,25764,25614,25540,25394,25250,
25109,24970,24901,24766,24633,24501,24372,24245,24182,24058,
23936,23816,23697,23580,23522,23408,23295,23184,23075,23021,
22913,22808,22703,22600,22499,22449,22349,22251,22154,22059,
21964
};
#endif
#ifdef MAX_MODULATION_96_PER_CENT
#define START_INDEX 58
const u16 circle_limit_table[70]=
{
32619,32472,32184,31904,31631,31365,31106,30853,30728,30484,
30246,30013,29785,29563,29345,29238,29028,28822,28620,28423,
28229,28134,27946,27762,27582,27405,27231,27061,26977,26811,
26649,26489,26332,26178,26027,25952,25804,25659,25517,25376,
25238,25103,25035,24903,24772,24644,24518,24393,24270,24210,
24090,23972,23855,23741,23627,23516,23461,23352,23244,23138,
23033,22930,22828,22777,22677,22579,22481,22385,22290,22196
};
#endif
#ifdef MAX_MODULATION_97_PER_CENT
#define START_INDEX 60
const u16 circle_limit_table[68]=
{
32483,32206,31936,31672,31415,31289,31041,30799,30563,30331,
30105,29884,29668,29456,29352,29147,28947,28750,28557,28369,
28183,28002,27824,27736,27563,27393,27226,27062,26901,26743,
26588,26435,26360,26211,26065,25921,25780,25641,25504,25369,
25236,25171,25041,24913,24788,24664,24542,24422,24303,24186,
24129,24015,23902,23791,23681,23573,23467,23362,23258,23206,
23105,23004,22905,22808,22711,22616,22521,22429
};
#endif
#ifdef MAX_MODULATION_98_PER_CENT
#define START_INDEX 61
const u16 circle_limit_table[67]=
{
32494,32360,32096,31839,31587,31342,31102,30868,30639,30415,
30196,29981,29771,29565,29464,29265,29069,28878,28690,28506,
28325,28148,27974,27803,27635,27470,27309,27229,27071,26916,
26764,26614,26467,26322,26180,26039,25901,25766,25632,25500,
25435,25307,25180,25055,24932,24811,24692,24574,24458,24343,
24230,24119,24009,23901,23848,23741,23637,23533,23431,23331,
23231,23133,23036,22941,22846,22753,22661
};
#endif
#ifdef MAX_MODULATION_99_PER_CENT
#define START_INDEX 62
const u16 circle_limit_table[66]=
{
32635,32375,32121,31873,31631,31394,31162,30935,30714,30497,
30284,30076,29872,29672,29574,29380,29190,29003,28820,28641,
28464,28291,28122,27955,27791,27630,27471,27316,27163,27012,
26864,26718,26575,26434,26295,26159,26024,25892,25761,25633,
25569,25444,25320,25198,25078,24959,24842,24727,24613,24501,
24391,24281,24174,24067,23963,23859,23757,23656,23556,23458,
23361,23265,23170,23077,22984,22893
};
#endif
#ifdef MAX_MODULATION_100_PER_CENT
#define START_INDEX 63
const u16 circle_limit_table[65]=
{
32767,32390,32146,31907,31673,31444,31220,31001,30787,30577,30371,
30169,29971,29777,29587,29400,29217,29037,28861,28687,28517,
28350,28185,28024,27865,27709,27555,27404,27256,27110,26966,
26824,26685,26548,26413,26280,26149,26019,25892,25767,25643,
25521,25401,25283,25166,25051,24937,24825,24715,24606,24498,
24392,24287,24183,24081,23980,23880,23782,23684,23588,23493,
23400,23307,23215,23125
};
#endif
Volt_Components Stat_Volt_q_d;
/**********************************************************************************************************
把经过PID调整过的d、q值的合成矢量模值限制在最大值,如果超过了,那么等比例缩小d、q值
**********************************************************************************************************/
void RevPark_Circle_Limitation(void)
{
s32 temp;
//计算Vd^2+Vq^2
temp = Stat_Volt_q_d.qV_Component1 * Stat_Volt_q_d.qV_Component1 + Stat_Volt_q_d.qV_Component2 * Stat_Volt_q_d.qV_Component2;
if ( temp > (u32)(( MAX_MODULE * MAX_MODULE) ) ) //如果(Vd^2+Vq^2)大于MAX_MODULE^2,就要进行比例缩小
{
u16 index; //假设Vq=x*32767, Vd=y*32767
temp /= (u32)(512*32768); //(Vq^2+Vd^2)/(512*32768) = (x^2+y^2)*32767^2/(512*32768)=64(x^2+y^2)
temp -= START_INDEX ; //程序中,载波频率=15K,因此调制系数选择95%,MAX_MODULE=32767*95%=31128,START_INDEX=57
index = circle_limit_table[(u8)temp]; //当Vq、Vd接近于最大值32767,即x、y接近于1,temp=64(x^2+y^2)-START_INDEX=128-57有最大值71
//当Vd^2+Vq^2的值只比MAX_MODULE^2大一点,temp=(Vq^2+Vd^2)/(512*32768)-START_INDEX=MAX_MODULE^2/(512*32768)-57有最小值0
//因此调制系数为95%的circle_limit_table表中只有72个数,并且根据Vd^2+Vq^2的大小来选择缩小的系数
temp = (s16)Stat_Volt_q_d.qV_Component1 * (u16)(index); //使用缩小系数来缩小Vq
Stat_Volt_q_d.qV_Component1 = (s16)(temp/32768);
temp = (s16)Stat_Volt_q_d.qV_Component2 * (u16)(index); //使用缩小系数来缩小Vd
Stat_Volt_q_d.qV_Component2 = (s16)(temp/32768);
}
} 上面的过程也没有什么好说的,具体可以看注释。为了优化处理速度,能用查表的地方都用查表了。
7、SVPWM的实现
根据FOC的处理过程,相电流采样后经过clark变换、park变换得到d、q轴值,然后和参考值做PID运算,再经过归一化,反park变换得到 Vα、Vβ,这就是FOC的处理结果,然后输出给SVPWM去执行,下面我们来看看SVPWM处理函数:
#define SQRT_3 1.732051 //根号3
#define T (PWM_PERIOD * 4) //TIM1 ARR值的4倍
#define T_SQRT3 (u16)(T * SQRT_3)
#define SECTOR_1 (u32)1
#define SECTOR_2 (u32)2
#define SECTOR_3 (u32)3
#define SECTOR_4 (u32)4
#define SECTOR_5 (u32)5
#define SECTOR_6 (u32)6
void CALC_SVPWM(Volt_Components Stat_Volt_Input)
{
u8 bSector;
s32 wX, wY, wZ, wUAlpha, wUBeta;
u16 hTimePhA=0, hTimePhB=0, hTimePhC=0;
wUAlpha = Stat_Volt_Input.qV_Component1 * T_SQRT3;
wUBeta = -(Stat_Volt_Input.qV_Component2 * T);
wX = wUBeta;
wY = (wUBeta + wUAlpha)/2;
wZ = (wUBeta - wUAlpha)/2;
//下面是查找定子电流的扇区号
if (wY<0)
{
if (wZ<0)
{
bSector = SECTOR_5;
}
else // wZ >= 0
if (wX<=0)
{
bSector = SECTOR_4;
}
else // wX > 0
{
bSector = SECTOR_3;
}
}
else // wY > 0
{
if (wZ>=0)
{
bSector = SECTOR_2;
}
else // wZ < 0
if (wX<=0)
{
bSector = SECTOR_6;
}
else // wX > 0
{
bSector = SECTOR_1;
}
}
switch(bSector) //根据所在扇区号,计算三相占空比
{
case SECTOR_1:
case SECTOR_4:
hTimePhA = (T/8) + ((((T + wX) - wZ)/2)/131072);
hTimePhB = hTimePhA + wZ/131072;
hTimePhC = hTimePhB - wX/131072;
break;
case SECTOR_2:
case SECTOR_5:
hTimePhA = (T/8) + ((((T + wY) - wZ)/2)/131072);
hTimePhB = hTimePhA + wZ/131072;
hTimePhC = hTimePhA - wY/131072;
break;
case SECTOR_3:
case SECTOR_6:
hTimePhA = (T/8) + ((((T - wX) + wY)/2)/131072);
hTimePhC = hTimePhA - wY/131072;
hTimePhB = hTimePhC + wX/131072;
break;
default:
break;
}
TIM1->CCR1 = hTimePhA;
TIM1->CCR2 = hTimePhB;
TIM1->CCR3 = hTimePhC;
}1、上面的处理的处理函数,先用输入的Vα、Vβ计算wUAlpha、wUBeta,再根据wUAlpha、wUBeta计算wX、wY、wZ,再由wX、wY、wZ判断扇区号和占空比,计算过程完全同手册说的一样:
计算wUAlpha、wUBeta:
![]()
计算wX、wY、wZ:
![]() ,
,

判断扇区号:

计算占空比:
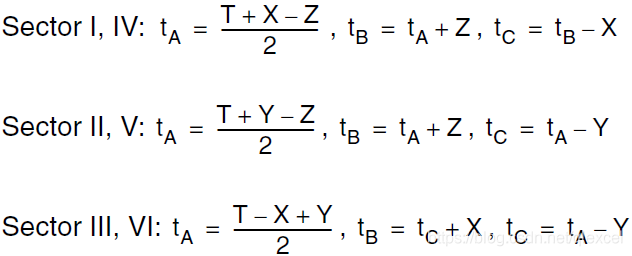
2、扇区判断和占空比计算的原理与这篇文章说的一样,这里就不细说了。代码中有疑虑就是那个T/8和131072是什么意思。
hTimePhA = (T/8) + ((((T + wX) - wZ)/2)/131072);
hTimePhB = hTimePhA + wZ/131072;
hTimePhC = hTimePhB - wX/131072;因为T等于4倍的ARR值,所以T/8就等于ARR/2,相当于把3个通道的比较值平移了半个周期。因为当3个通道的波形相同时,实际上并没有输出(只有3个低侧开关管或高侧开关管打开),真正有输出的是3个通道波形不一样的地方(有高侧管子打开也有低侧管子打开),所以让3个通道同时移动相同ARR/2对输出并没有什么影响,同时方便了计算,避免了出现通道比较值为负的情况。
至于131072,网上有人是这么说的:
(2^15)*4 = 32768*4 = 131072
#define T (PWM_PERIOD * 4),这里有一个4倍的放大。
然后电流采用了Q15表示(左对齐),2^15 = 32768。
所以最后计算需要除以131072。
这篇帖子也有相关讨论:链接
因为用的st的库,svpwm的实现函数也没怎么去研究过。感觉这个函数有点绕,让人晕,其实知道了原理后,读者可以自己实现。
8、FOC总的处理函数:
Curr_Components Stat_Curr_a_b;
Curr_Components Stat_Curr_alfa_beta;
Curr_Components Stat_Curr_q_d;
Curr_Components Stat_Curr_q_d_ref_ref; //电流环的给定值,用于电流环Id,Iq和前馈电流控制的给定值
Volt_Components Stat_Volt_q_d;
Volt_Components Stat_Volt_alfa_beta;
void FOC_Model(void) //电流环处理函数
{
Stat_Curr_a_b = GET_PHASE_CURRENTS(); //读取2相的电流值
Stat_Curr_alfa_beta = Clarke(Stat_Curr_a_b); //Ia,Ib通过Clark变换得到Ialpha和Ibeta
Stat_Curr_q_d = Park( Stat_Curr_alfa_beta,ENC_Get_Electrical_Angle() ); //输入电角度、Ialpha和Ibeta,经过Park变换得到Iq、Id
//q轴的pid运算,得到Vq
Stat_Volt_q_d.qV_Component1 = PID_Regulator(Stat_Curr_q_d_ref_ref.qI_Component1,Stat_Curr_q_d.qI_Component1, &PID_Torque_InitStructure);
//d轴的pid运算,得到Vd
Stat_Volt_q_d.qV_Component2 = PID_Regulator(Stat_Curr_q_d_ref_ref.qI_Component2,Stat_Curr_q_d.qI_Component2, &PID_Flux_InitStructure);
RevPark_Circle_Limitation(); //归一化
Stat_Volt_alfa_beta = Rev_Park(Stat_Volt_q_d); //反Park变换
CALC_SVPWM(Stat_Volt_alfa_beta); //svpwm实现函数,实际的电流输出控制
}把这个函数放在ADC注入组转换完成中断中调用即可。
现在我们梳理一下整个过程:配置TIM1、ADC,并设置ADC的注入组转换由TIM1触发。这样在每个载波周期,都会触发一次ADC注入组采样,相电流采样完成后调用FOC_Model进行FOC运算处理,然后把最后的计算结果更新到TIM1的输出。现在还有一个问题:现在自己手中有上面的代码、相关的硬件和一个电机,怎么让电机开始转起来呢?那就要看这篇文章了。
9、弱磁控制
待续。。
PS:工程要的人多,我放在这儿了https://www.cirmall.com/circuit/16544,卖3块,平台收30%,得2.1,当赏瓶可乐吧。
工程中的代码在本文中已经基本给出来了,为了方便大家直接看,才给出工程的,少去了你自己去整理代码。至于为什么卖3块,我已经说了是“赏”,你觉得看了文章有帮助,“赏”给我的。
那些因为我卖钱,就骂我的白嫖党也是牛逼,你觉得我花时间写这些东西给你们看,是天经地义的?爱看看,不看滚。
转载自原文链接, 如需删除请联系管理员。
原文链接:FOC和SVPWM的C语言代码实现,转载请注明来源!