一、介绍
1、内部框图


可以看到AMG8833的内部有红外点阵测温,并且还带有一个热敏电阻。使用同一个ADC进行采样,然后送给Control。
2、器件参数
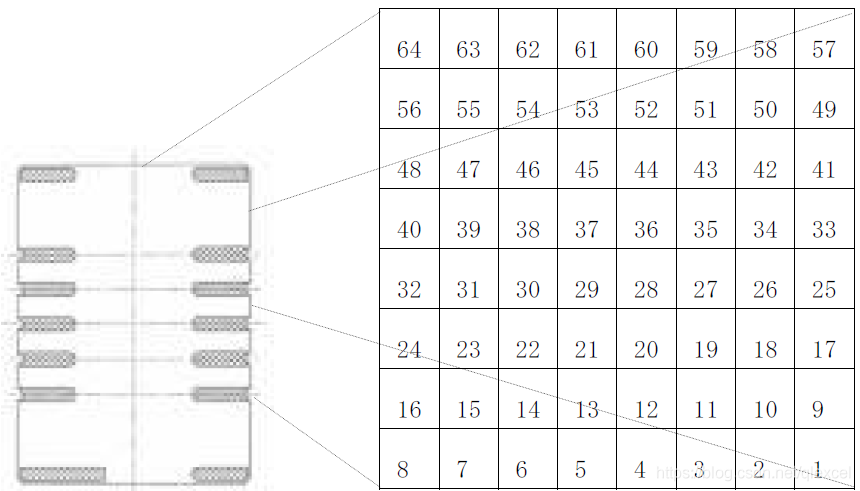
测温点数:64(8x8的矩阵)
帧率:10帧每秒或1帧每秒
红外测温分辨率:0.25℃
热敏电阻测量温度范围:-20℃~80℃
热敏电阻分辨率:0.0625℃
红外测温的准确度:High gain误差在2.5℃以内;Low gain误差在3℃以内。
3、点阵的排布顺序是:从右到左、从下到上。因此右下角才是第一个点。
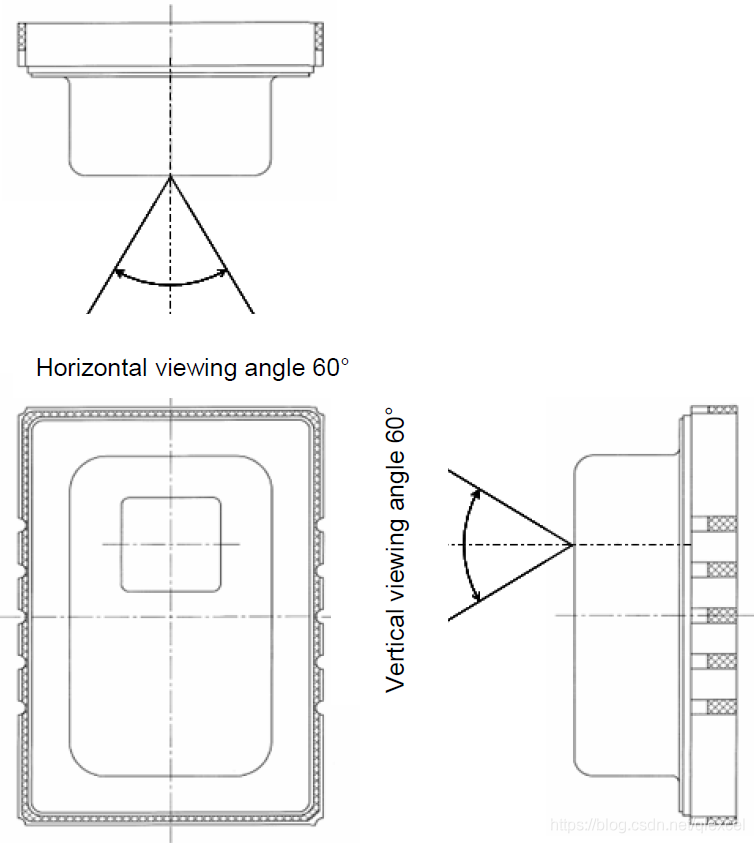
4、视角是水平60度、垂直60度。
5、原理图

2脚和3脚是IIC通信引脚,最大速度400K。
4脚是中断引脚,如果INT control寄存器中激活了中断功能,当发生中断,此引脚会拉低。
5脚是IIC设备地址选择脚。拉低,设备地址为110 1000,即0x68。拉高,设备地址为110 1001,即0x69。
设备地址占据高7位,最低位是读写位,0表示写,1表示读。所以当5脚拉低,进行写操作时,8位数据为:1101 0000,即0xD0,读操作时,8位数据为:1101 0001,即0xD1。
6脚为地。
9脚和13脚为VDD,可以3.3V或5V供电。
10脚接一个电容和电阻。
12脚接一个电容。
二、寄存器
1、Power Control寄存器:设置AMG8833的工作模式

工作模式有4种:

模式之间的转换关系:
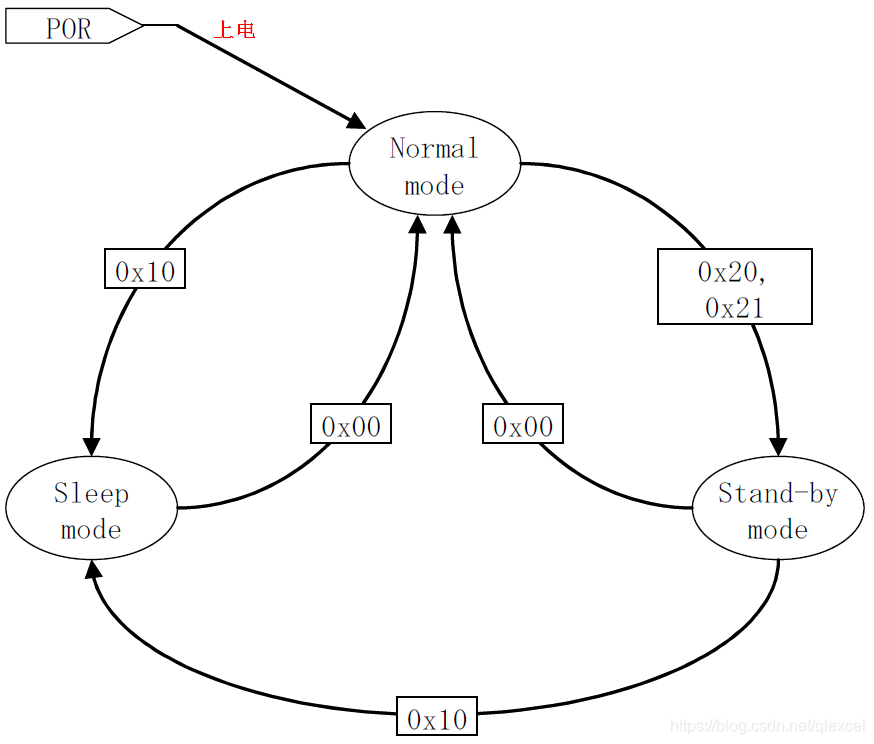
注:
(1)在休眠模式中进行的写操作只有在进入正常模式后才生效。
(2)在休眠模式中读操作是无效的。
2、Reset寄存器:进行软复位。

有两种复位方式:
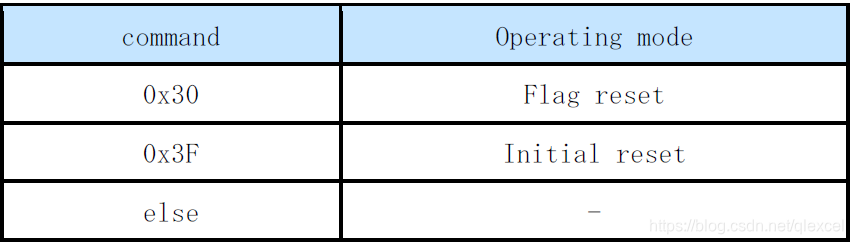
Flag Reset会清除Status寄存器(0x04)、中断标志、中断表(0x10~0x17)
Initial Reset会复位标志,并使AMG8833的参数恢复初始。
3、Frame Rate寄存器:设定帧率

bit0: Setting Frame Mode
1: 1FPS
0: 10FPS
4、Interrupt Control寄存器:配置中断功能

bit1: INTMOD
1: Absolute Value Interrupt Mode
0: Difference Interrupt Mode
bit0: INTEN
1: INT 引脚输出使能
0: INT 引脚禁止输出(保持高阻状态)
5、Status寄存器:溢出标志和中断标志

bit3: OVF_THS
1: 热敏电阻温度输出溢出标志
(Value of Thermistor (0x0E、0x0F) : 0xFFF)
bit2: OVF_IRS
1: 红外温度输出溢出标志
(Value of Temperature Register(0x80~0xFF): 0xFFF)
bit1: INTF
1: 发生中断标志
(Value of Interrupt Table Register(0x10~0x17): Except for 0x00)
6、Status Clear寄存器:清除溢出标志和中断标志

bit3: OVT_CLR
1: 清除热敏电阻温度输出溢出标志
bit2: OVS_CLR
1: 清除红外温度输出溢出标志
bit1: INTCLR
1: 清除中断标志
7、Average寄存器:设置移动平均输出模式

bit5: MAMOD
1::Twice moving average Output Mode
0:No moving average
8、Interrupt Level寄存器:设置发生中断的上限值、下限值、迟滞值。
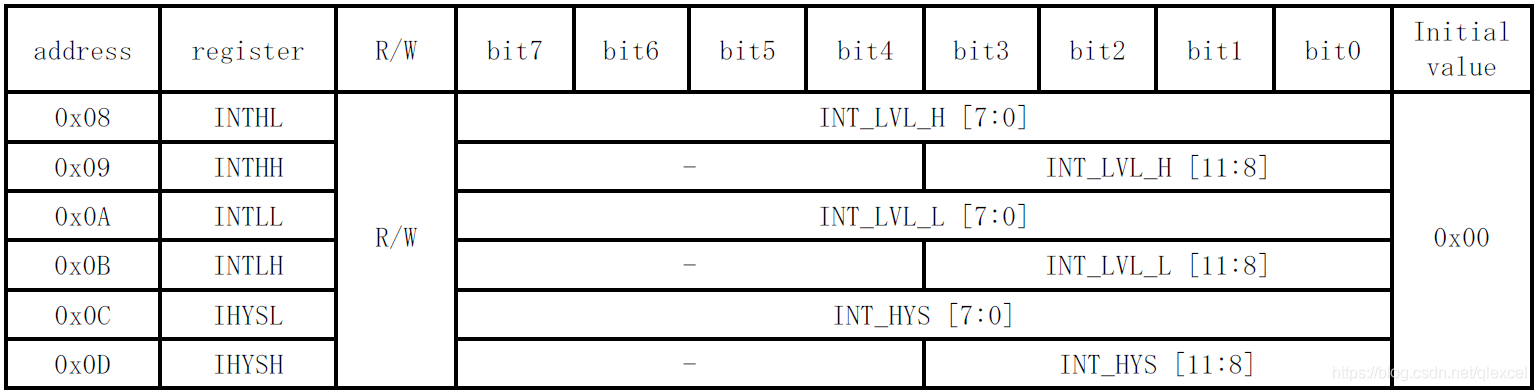
INT_LVL_H [11:0]:中断上限值,当温度高于此值,输出中断并且设置Interrupt Table寄存器。
INT_LVL_L [11:0]:中断下限值,当温度低于此值,输出中断并且设置Interrupt Table寄存器。
INT_HYS [11:0]:设置上限值、下限值的迟滞值,类似于施密特触发器。
上述3个数据都是12位数据。最高位为符号位,值为0表示正,值为1表示负。步进值为0.25℃。
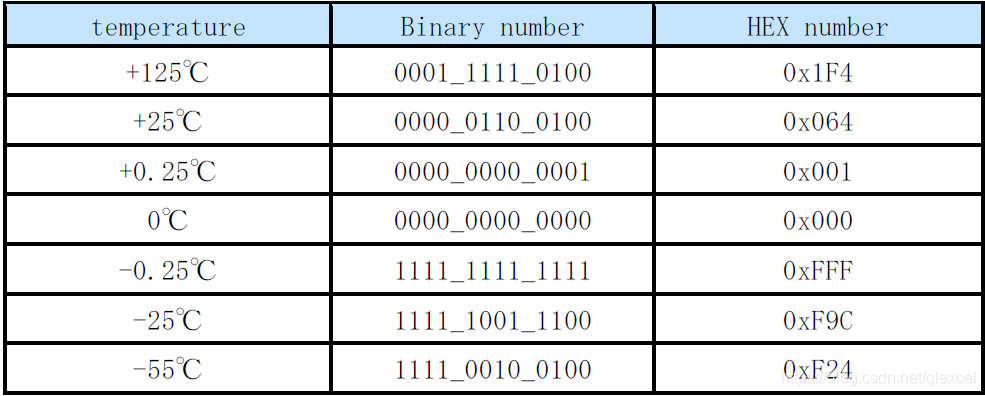
9、Thermistor寄存器:热敏电阻测量的温度值

有12位数据。最高位为符号位,值为0表示正,值为1表示负。步进值为0.0625℃。举例如下:
10、Interrupt Table寄存器:显示哪一个像素点发生了中断
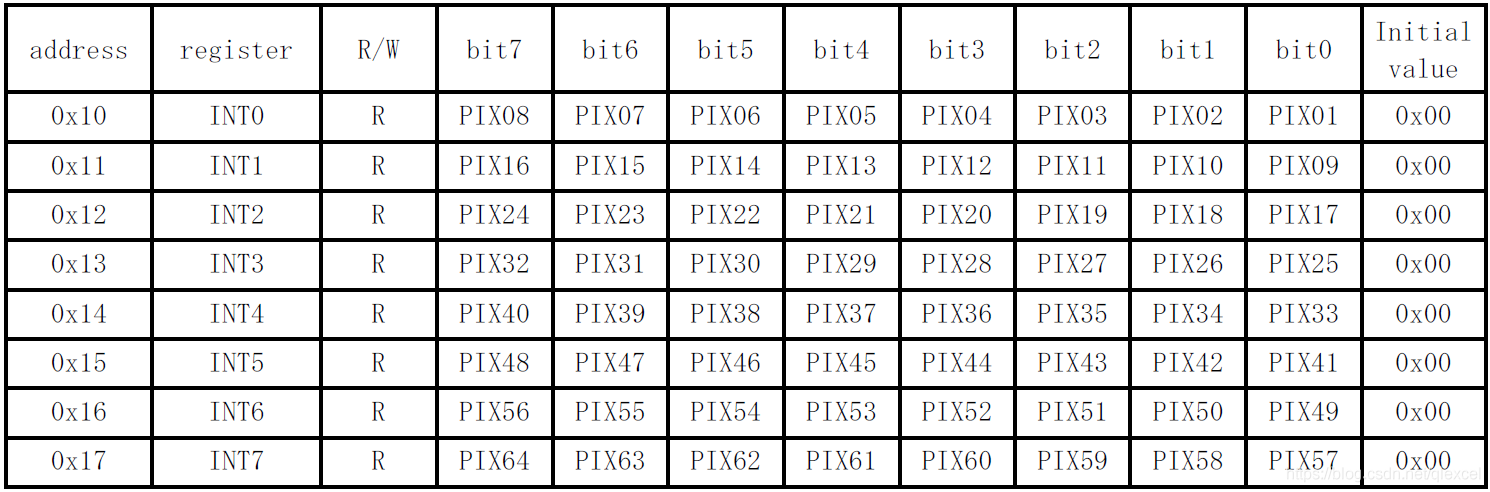
当64个像素点中的某一个点的温度值高于或低于了Interrupt Level寄存器中设置的上下限,就会在Interrupt Table寄存器的对应位设置值。值为1代表发生了中断,0表示没有。
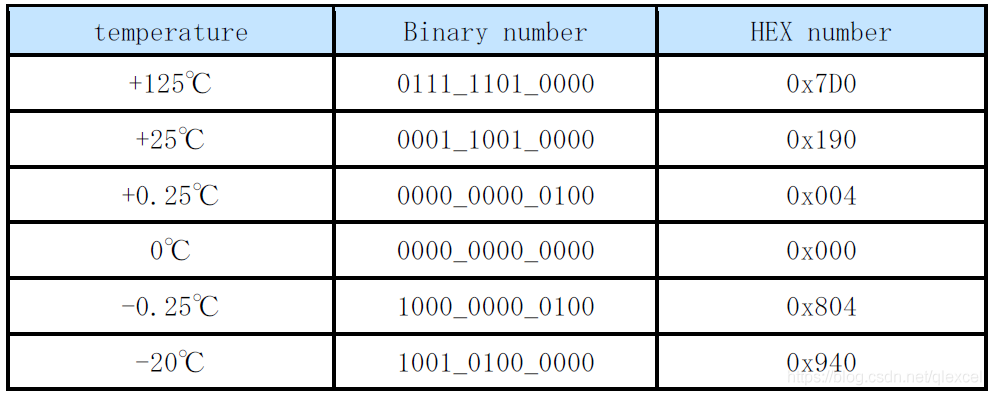
11、Temperature寄存器:红外点阵测量的温度值

有12位数据。最高位为符号位,值为0表示正,值为1表示负。步进值为0.25℃。举例如下:
0x80和0x81保存的是第一个像素的温度值,1~64像素对应地址为0x80~0xFF。
注:
(1)1~64像素(0x80~0xFF)的温度值是一起更新的,不需要任何指令。
(2)0x80~0xFF的数据是一次读出的,所以不用担心新的温度值和旧的温度值会混在一起。
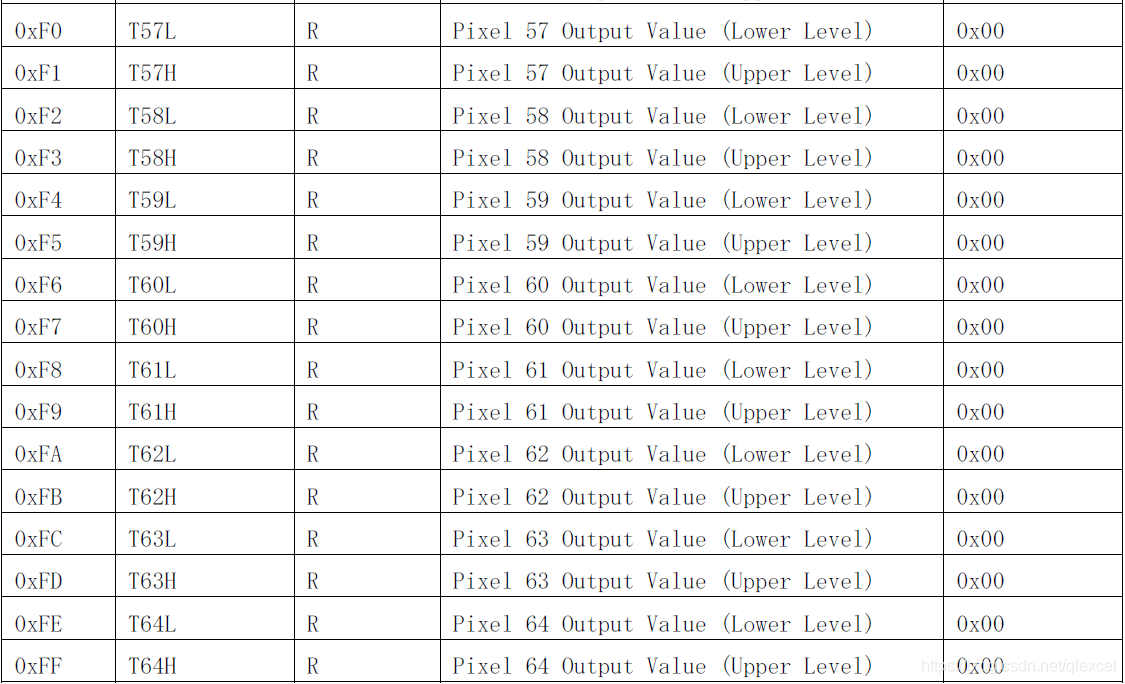
三、寄存器总表
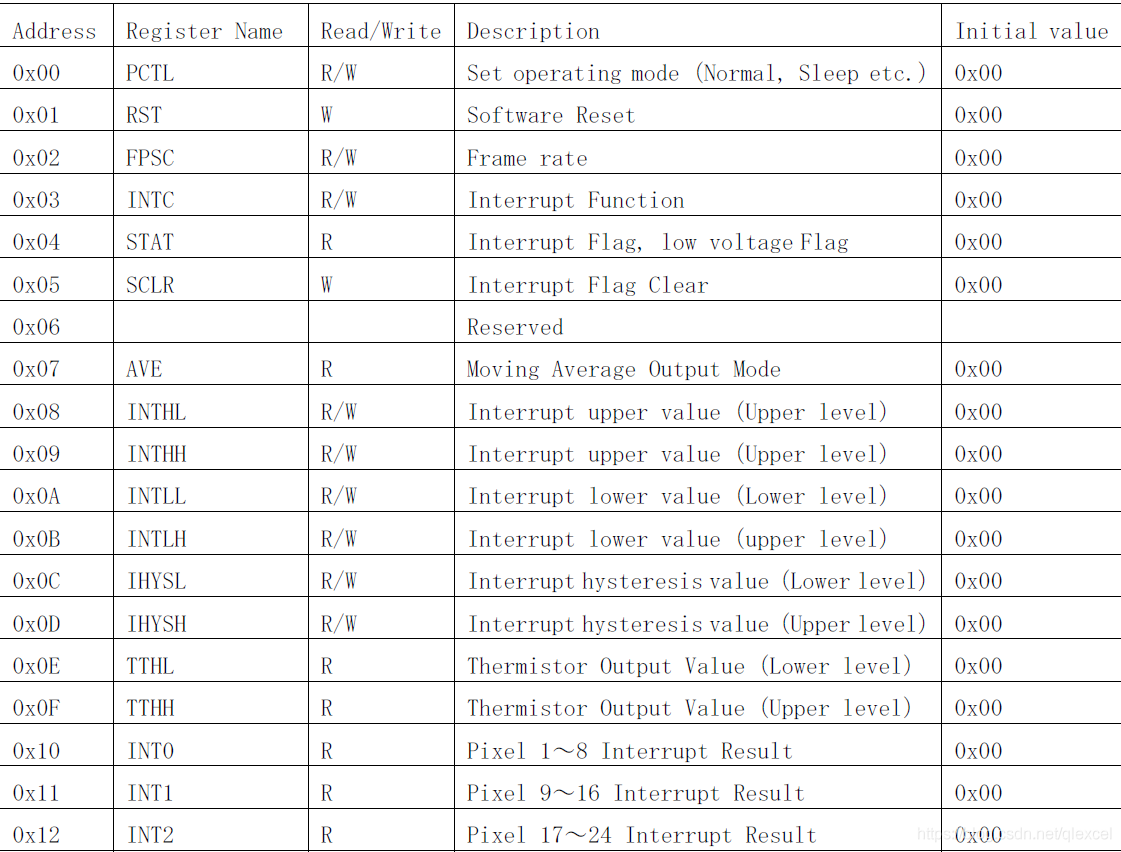


。。。
四、驱动代码
1、AMG_IIC.h
#ifndef __AMG_I2C_H
#define __AMG_I2C_H
#include "stdint.h"
#include "sys.h"
#include "delay.h"
#define AMG_SDA_RCC RCC_APB2Periph_GPIOB
#define AMG_SDA_PIN GPIO_Pin_7
#define AMG_SDA_IOx GPIOB
#define AMG_SCL_RCC RCC_APB2Periph_GPIOB
#define AMG_SCL_PIN GPIO_Pin_6
#define AMG_SCL_IOx GPIOB
#define AMG_SDA_IN() {GPIOB->CRL&=0x0FFFFFFF;GPIOB->CRL|=8<<28;}
#define AMG_SDA_OUT() {GPIOB->CRL&=0x0FFFFFFF;GPIOB->CRL|=3<<28;}
#define AMG_IIC_SCL PBout(6) //SCL
#define AMG_IIC_SDA PBout(7) //SDA
#define AMG_READ_SDA PBin(7) //输入SDA
#define AMG88xx_ADR 0xD0 //5脚拉低时的设备地址
//Status
#define STATUS_OK 0x00
#define STATUS_FAIL 0x01
void AMG8833_IIC_Init(void);
u8 AMG_IIC_Write_1Byte(u8 SlaveAddress, u8 REG_Address,u8 REG_data);
u8 AMG_IIC_Read_1Byte(u8 SlaveAddress, u8 REG_Address,u8 *REG_data);
uint8_t AMG_I2C_Read_nByte(uint8_t SlaveAddress, uint8_t REG_Address, uint8_t *buf, uint16_t len);
#endif
2、AMG_IIC.c
#include "AMG_IIC.h"
void AMG8833_IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( AMG_SDA_RCC, ENABLE );
GPIO_InitStructure.GPIO_Pin = AMG_SDA_PIN; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //50Mhz速度
GPIO_Init(AMG_SDA_IOx, &GPIO_InitStructure);
RCC_APB2PeriphClockCmd( AMG_SCL_RCC, ENABLE );
GPIO_InitStructure.GPIO_Pin = AMG_SCL_PIN; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //50Mhz速度
GPIO_Init(AMG_SCL_IOx, &GPIO_InitStructure);
GPIO_SetBits(AMG_SDA_IOx,AMG_SDA_PIN);//SDA输出高
GPIO_SetBits(AMG_SCL_IOx,AMG_SCL_PIN);//SCL输出高
}
void AMG_IIC_Start(void)
{
AMG_SDA_OUT();//sda线输出
AMG_IIC_SDA=1;
AMG_IIC_SCL=1;
delay_us(4);
AMG_IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
AMG_IIC_SCL=0;//钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
void AMG_IIC_Stop(void)
{
AMG_SDA_OUT();//sda线输出
AMG_IIC_SCL=0;
AMG_IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
AMG_IIC_SCL=1;
AMG_IIC_SDA=1;//发送I2C总线结束信号
delay_us(4);
}
u8 AMG_IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
AMG_SDA_IN(); //SDA设置为输入
AMG_IIC_SDA=1;delay_us(1);
AMG_IIC_SCL=1;delay_us(1);
while(AMG_READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
AMG_IIC_Stop();
return 1;
}
}
AMG_IIC_SCL=0;//时钟输出0
return 0;
}
//产生ACK应答
void AMG_IIC_Ack(void)
{
AMG_IIC_SCL=0;
AMG_SDA_OUT();
AMG_IIC_SDA=0;
delay_us(2);
AMG_IIC_SCL=1;
delay_us(2);
AMG_IIC_SCL=0;
}
//不产生ACK应答
void AMG_IIC_NAck(void)
{
AMG_IIC_SCL=0;
AMG_SDA_OUT();
AMG_IIC_SDA=1;
delay_us(2);
AMG_IIC_SCL=1;
delay_us(2);
AMG_IIC_SCL=0;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void AMG_IIC_Send_Byte(u8 txd)
{
u8 t;
AMG_SDA_OUT();
AMG_IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
if((txd&0x80)>>7)
AMG_IIC_SDA=1;
else
AMG_IIC_SDA=0;
txd<<=1;
delay_us(2);
AMG_IIC_SCL=1;
delay_us(2);
AMG_IIC_SCL=0;
delay_us(2);
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 AMG_IIC_Read_Byte(void)
{
unsigned char i,receive=0;
AMG_SDA_IN(); //SDA设置为输入
AMG_IIC_SDA = 1;
delay_us(4);
for(i=0;i<8;i++ )
{
receive<<=1;
AMG_IIC_SCL=0;
delay_us(4);
AMG_IIC_SCL=1;
delay_us(4);
if(AMG_READ_SDA)
receive |= 0x01;
delay_us(4); //1
}
AMG_IIC_SCL = 0;
return receive;
}
//IIC写一个字节数据
u8 AMG_IIC_Write_1Byte(u8 SlaveAddress, u8 REG_Address,u8 REG_data)
{
AMG_IIC_Start();
AMG_IIC_Send_Byte(SlaveAddress);
if(AMG_IIC_Wait_Ack())
{
AMG_IIC_Stop();//释放总线
return 1;//没应答则退出
}
AMG_IIC_Send_Byte(REG_Address);
AMG_IIC_Wait_Ack();
delay_us(5);
AMG_IIC_Send_Byte(REG_data);
AMG_IIC_Wait_Ack();
AMG_IIC_Stop();
return 0;
}
//IIC读一个字节数据
u8 AMG_IIC_Read_1Byte(u8 SlaveAddress, u8 REG_Address,u8 *REG_data)
{
AMG_IIC_Start();
AMG_IIC_Send_Byte(SlaveAddress);//发写命令
if(AMG_IIC_Wait_Ack())
{
AMG_IIC_Stop();//释放总线
return 1;//没应答则退出
}
AMG_IIC_Send_Byte(REG_Address);
AMG_IIC_Wait_Ack();
delay_us(5);
AMG_IIC_Start();
AMG_IIC_Send_Byte(SlaveAddress|0x01);//发读命令
AMG_IIC_Wait_Ack();
*REG_data = AMG_IIC_Read_Byte();
AMG_IIC_Stop();
return 0;
}
//I2C读多个字节数据
uint8_t AMG_I2C_Read_nByte(uint8_t SlaveAddress, uint8_t REG_Address, uint8_t *buf, uint16_t len)
{
AMG_IIC_Start();
AMG_IIC_Send_Byte(SlaveAddress);//发写命令
if(AMG_IIC_Wait_Ack())
{
AMG_IIC_Stop();//释放总线
return 1;//没应答则退出
}
AMG_IIC_Send_Byte(REG_Address);
AMG_IIC_Wait_Ack();
delay_us(5);
AMG_IIC_Start();
AMG_IIC_Send_Byte(SlaveAddress|0x01);//发读命令
AMG_IIC_Wait_Ack();
while(len)
{
*buf = AMG_IIC_Read_Byte();
if(1 == len)
{
AMG_IIC_NAck();
}
else
{
AMG_IIC_Ack();
}
buf++;
len--;
}
AMG_IIC_Stop();
return STATUS_OK;
}
//I2C写多个字节数据
uint8_t AMG_I2C_Write_nByte(uint8_t SlaveAddress, uint8_t REG_Address, uint8_t *buf, uint16_t len)
{
AMG_IIC_Start();
AMG_IIC_Send_Byte(SlaveAddress);//发写命令
if(AMG_IIC_Wait_Ack())
{
AMG_IIC_Stop();//释放总线
return 1;//没应答则退出
}
AMG_IIC_Send_Byte(REG_Address);
AMG_IIC_Wait_Ack();
while(len--)
{
AMG_IIC_Send_Byte(*buf++);
AMG_IIC_Wait_Ack();
}
AMG_IIC_Stop();
return STATUS_OK;
}
3、AMG8833.h
#ifndef __AMG8833_H
#define __AMG8833_H
#include "AMG_IIC.h"
#define AMG88xx_PIXEL_TEMP_CONVERSION 0.25
#define AMG88xx_THERMISTOR_CONVERSION 0.0625
enum
{
AMG88xx_PCTL = 0x00,
AMG88xx_RST = 0x01,
AMG88xx_FPSC = 0x02,
AMG88xx_INTC = 0x03,
AMG88xx_STAT = 0x04,
AMG88xx_SCLR = 0x05,
//0x06 reserved
AMG88xx_AVE = 0x07,
AMG88xx_INTHL = 0x08,
AMG88xx_INTHH = 0x09,
AMG88xx_INTLL = 0x0A,
AMG88xx_INTLH = 0x0B,
AMG88xx_IHYSL = 0x0C,
AMG88xx_IHYSH = 0x0D,
AMG88xx_TTHL = 0x0E,
AMG88xx_TTHH = 0x0F,
AMG88xx_INT_OFFSET = 0x010,
AMG88xx_PIXEL_OFFSET = 0x80
};
enum power_modes{
AMG88xx_NORMAL_MODE = 0x00,
AMG88xx_SLEEP_MODE = 0x01,
AMG88xx_STAND_BY_60 = 0x20,
AMG88xx_STAND_BY_10 = 0x21
};
enum sw_resets {
AMG88xx_FLAG_RESET = 0x30,
AMG88xx_INITIAL_RESET = 0x3F
};
enum frame_rates {
AMG88xx_FPS_10 = 0x00,
AMG88xx_FPS_1 = 0x01
};
enum int_enables{
AMG88xx_INT_DISABLED = 0x00,
AMG88xx_INT_ENABLED = 0x01
};
enum int_modes {
AMG88xx_DIFFERENCE = 0x00,
AMG88xx_ABSOLUTE_VALUE = 0x01
};
void AMG8833_Init(void);
float AMG88xx_ReadThermistor(void);
void amg88xx_readPixels(float *buf, uint8_t size);
#endif
4、AMG8833.c
#include "AMG8833.h"
void AMG8833_Init(void)
{
AMG8833_IIC_Init(); //IIC初始化
//enter normal mode
AMG_IIC_Write_1Byte(AMG88xx_ADR,AMG88xx_PCTL,AMG88xx_NORMAL_MODE);
//software reset
AMG_IIC_Write_1Byte(AMG88xx_ADR,AMG88xx_RST,AMG88xx_INITIAL_RESET);
//set to 10 FPS
AMG_IIC_Write_1Byte(AMG88xx_ADR,AMG88xx_FPSC,AMG88xx_FPS_10);
}
float signedMag12ToFloat(uint16_t val)
{
//take first 11 bits as absolute val
uint16_t absVal = (val & 0x7FF);
return (val & 0x800) ? 0 - (float)absVal : (float)absVal ;
}
float AMG88xx_ReadThermistor(void)
{
uint8_t raw[2];
uint16_t recast;
AMG_I2C_Read_nByte(AMG88xx_ADR,AMG88xx_TTHL, raw, 2);
recast = ((uint16_t)raw[1] << 8) | ((uint16_t)raw[0]);
return signedMag12ToFloat(recast) * AMG88xx_THERMISTOR_CONVERSION;
}
void amg88xx_readPixels(float *buf, uint8_t size)
{
uint16_t recast;
float converted;
uint8_t rawArray[128],i;
AMG_I2C_Read_nByte(AMG88xx_ADR,AMG88xx_PIXEL_OFFSET,rawArray,128);
for(i=0; i<size; i++)
{
uint8_t pos = i << 1;
recast = ((uint16_t)rawArray[pos + 1] << 8) | ((uint16_t)rawArray[pos]);
converted = signedMag12ToFloat(recast) * AMG88xx_PIXEL_TEMP_CONVERSION;
buf[i] = converted;
}
}
转载自原文链接, 如需删除请联系管理员。
原文链接:AMG8833的使用与stm32驱动代码,转载请注明来源!