简介
陀螺仪原理上就是运用物体高速旋转时,角动量很大,旋转轴会一直稳定指向一个方向的性质所制造出来的定向仪器.传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约。自从上个世纪七十年代以来,现代陀螺仪的发展已经进入了一个全新的阶段。
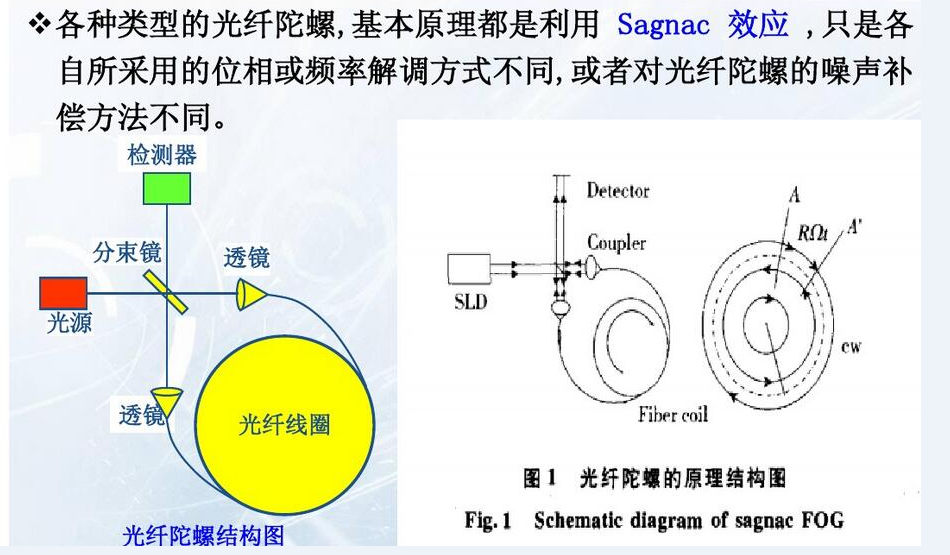
光纤陀螺仪是以光导纤维线圈为基础的敏感元件, 由激光二极管发射出的光线朝两个方向沿光导纤维传播。光传播路径的不同,决定了敏感元件的角位移。

主要技术指标
1零偏和零漂
零偏是输入角速度为零(即陀螺静止)时陀螺仪的输出量,用规定时间内测得的输出量平均值对应的等效输入角速度表示,理想情况下为地球自转角速度的分量。零漂即为零偏稳定性,表示当输入角速率为零时,陀螺仪输出量围绕其零偏均值的离散程度,用规定时间内输出量的标准偏差对应的等效输入角速率表示。零漂是衡量光纤陀螺精度的最重要、最基本的指标。产生零漂的主要因素是沿光纤分布的环境温度变化在光纤线圈内引入的非互易性相移误差。通常为了稳定零漂,常需要对IFOG进行温度控制或者温度补偿。另外偏振也会对零漂产生一定的影响,在IFOG中常采用偏振滤波和保偏光纤的方法消除偏振对零漂的影响。
2 标度因数
标度因数是陀螺仪输出量与输入角速率的比值,在坐标轴上可以用某一特定直线斜率表示,它是反映陀螺灵敏度的指标,其稳定性和精确性是陀螺仪的一项重要指标,综合反映了光纤陀螺的测试和拟合精度。标度因数的稳定性无量纲,通常用百万分比(ppm)表示。标度因数的误差主要来源于温度变化和光纤偏振态的不稳定性。[1]
3 随机游走系数
表征光纤陀螺仪中角速度输出白噪声大小的一项技术指标,它反映的是光纤陀螺仪输出的角速度积分随时间积累的不确定性,因此也可称为角随机游走。随机游走系数反应了陀螺仪的研制水平,也反映了陀螺仪最小可检测的角速率。该误差主要来源于光子的随机自发辐射、光电探测器和数字电路引入的噪声和机械抖动。[1]
4 阈值和分辨率
阈值表示光纤陀螺能感应的最小输入速率。分辨率表示陀螺仪在规定输入角速率下能感应的最小输入速率增量。阈值和分辨率都表征光纤陀螺仪的灵敏度。[1]
5 最大输入角速度
表示陀螺正、反方向输入速率的最大值,表征陀螺的动态范围,即光纤陀螺可感应的速率范围。
特点
与机电陀螺或激光陀螺相比,光纤陀螺具有如下特点:
(1)零部件少,仪器牢固稳定,具有较强的抗冲击和抗加速运动的能力;
(2)绕制的光纤较长,使检测灵敏度和分辨率比激光陀螺仪提高了好几个数量级;
(3)无机械传动部件,不存在磨损问题,因而具有较长的使用寿命;
(4)易于采用集成光路技术,信号稳定,且可直接用数字输出,并与计算机接口联接;
(5)通过改变光纤的长度或光在线圈中的循环传播次数,可以实现不同的精度,并具有较宽的动态范围;
(6)相干光束的传播时间短,因而原理上可瞬间启动,无需预热;
(7)可与环形激光陀螺一起使用,构成各种惯导系统的传感器,尤其是捷联式惯导系统的传感器;
(8)结构简单、价格低,体积小、重量轻。
技术上的限制因素
光纤陀螺自1976年问世以来,得到了极大的发展。但是,光纤陀螺在技术上还存在一系列问题,这些问题影响了光纤陀螺的精度和稳定性,进而限制了其应用的广泛性。主要包括:
(1)温度瞬态的影响。理论上,环形干涉仪中的两个反向传播光路是等长的,但是这仅在系统不随时间变化时才严格成立。实验证明,相位误差以及旋转速率测量值的漂移与温度的时间导数成正比.这是十分有害的,特别是在预热期间。
(2)振动的影响。振动也会对测量产生影响,必须采用适当的封装以确保线圈良好的坚固性,内部机械设计必须十分合理,防止产生共振现象。
(3)偏振的影响。现在应用比较多的单模光纤是一种双偏振模式的光纤,光纤的双折射会产生一个寄生相位差,因此需要偏振滤波。消偏光纤可以抑制偏振,但是却会导致成本的增加。
为了提高陀螺的性能.人们提出了各种解决办法。包括对光纤陀螺组成元器件的改进,以及用信号处理的方法的改进等。
典型应用
转载自原文链接, 如需删除请联系管理员。
原文链接:光纤陀螺简介,转载请注明来源!