介绍Pascal VOC数据集:
- Challenge and tasks, 只介绍Detection与Segmentation相关内容。
- 数据格式
- 衡量方式
- voc2007, voc2012
Challenge and tasks
给定自然图片, 从中识别出特定物体。
待识别的物体有20类:
- person
- bird, cat, cow, dog, horse, sheep
- aeroplane, bicycle, boat, bus, car, motorbike, train
- bottle, chair, dining table, potted plant, sofa, tv/monitor
有以下几个task:
* Classification(略过)
* Detection: 将图片中所有的目标用bounding box(bbox)框出来
* Segmentation: 将图片中所有的目标分割出来
* Person Layout(略过)
接下来本文只介绍Detection与Segmentation相关的内容。
Dataset
- 所有的标注图片都有Detection需要的label, 但只有部分数据有Segmentation Label。
- VOC2007中包含9963张标注过的图片, 由train/val/test三部分组成, 共标注出24,640个物体。
- VOC2007的test数据label已经公布, 之后的没有公布(只有图片,没有label)。
- 对于检测任务,VOC2012的trainval/test包含08-11年的所有对应图片。 trainval有11540张图片共27450个物体。
- 对于分割任务, VOC2012的trainval包含07-11年的所有对应图片, test只包含08-11。trainval有 2913张图片共6929个物体。
Detection Ground Truth and Evaluation
Ground truth
<annotation>
<folder>VOC2007</folder>
<filename>009961.jpg</filename>
<source>
<database>The VOC2007 Database</database>
<annotation>PASCAL VOC2007</annotation>
<image>flickr</image>
<flickrid>334575803</flickrid>
</source>
<owner>
<flickrid>dictioncanary</flickrid>
<name>Lucy</name>
</owner>
<size><!--image shape-->
<width>500</width>
<height>374</height>
<depth>3</depth>
</size>
<segmented>0</segmented><!--是否有分割label-->
<object>
<name>dog</name> <!--类别-->
<pose>Unspecified</pose><!--物体的姿态-->
<truncated>0</truncated><!--物体是否被部分遮挡(>15%)-->
<difficult>0</difficult><!--是否为难以辨识的物体, 主要指要结体背景才能判断出类别的物体。虽有标注, 但一般忽略这类物体-->
<bndbox><!--bounding box-->
<xmin>69</xmin>
<ymin>4</ymin>
<xmax>392</xmax>
<ymax>345</ymax>
</bndbox>
</object>
</annotation>Evaluation
提交的结果存储在一个文件中, 每行的格式为:
<image identifier> <confidence> <left> <top> <right> <bottom>例如:
comp3_det_test_car.txt:
000004 0.702732 89 112 516 466
000006 0.870849 373 168 488 229
000006 0.852346 407 157 500 213
000006 0.914587 2 161 55 221
000008 0.532489 175 184 232 201- confidence会被用于计算mean average precision(mAP). 简要流程如下, 详细可参考https://sanchom.wordpress.com/tag/average-precision/
- 根据confidence对结果排序,计算top-1, 2, …N对应的precision和recall
- 将recall划分为n个区间
t in [t1, ..., tn] - 找出满足
recall>=t的最大presicision - 最后得到n个最大precision, 求它们的平均值
aps = []
for t in np.arange(0., 1.1, 0.1):#将recall分为多个区间
# 在所有 recall > t对应的precision中找出最大值
mask = tf.greater_equal(recall, t)
v = tf.reduce_max(tf.boolean_mask(precision, mask))
aps.append(v / 11.)
# 得到其平均值
ap = tf.add_n(aps)
return ap代码给出的是voc07的计算方式, voc2010在recall区间区分上有变化: 假如有M个正样例,则将recall划分为[1/M, 1/(M - 1), 1/(M - 2), ... 1]。其余步骤不变。
- 如输出的bbox与一个ground truth bbox的 IOU大于0.5, 且类别相同,则为True Positive, 否则为False Positive
- 对于一个ground truth bbox, 只会有一个 true positive, 其余都为false positive.
Segmentation
Ground Truth
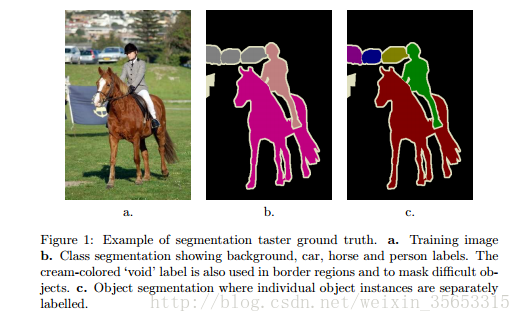
分割的label由两部分组成:
* class segmentation: 标注出每一个像素的类别
* object segmentation: 标注出每一个像素属于哪一个物体

Evaluation
每类的precision和总体precision.
Reference
- http://host.robots.ox.ac.uk/pascal/VOC/
- http://host.robots.ox.ac.uk/pascal/VOC/voc2007/
- http://host.robots.ox.ac.uk/pascal/VOC/voc2007/devkit_doc_07-Jun-2007.pdf
- http://host.robots.ox.ac.uk/pascal/VOC/voc2012/devkit_doc.pdf
转载自原文链接, 如需删除请联系管理员。
原文链接:Pascal VOC 数据集介绍,转载请注明来源!