上午10点15到公司,hr让我先笔试。
1.C++ STL当中map和hash_map的查找算法是怎么样的,时间复杂度是多少。
https://blog.csdn.net/dongtingzhizi/article/details/8629285
2.线程和进程的区别,以及什么时候适合用线程进程。
https://blog.csdn.net/linux12121/article/details/51786233
3.给了三个卷积核分别和灰度图像做卷积,问得到什么效果?
4.C++手撕冒泡排序
https://zhuanlan.zhihu.com/p/52884590
5.给一张100块的人民币,要检测出图片中冠名字符,写原理和流程。
OpenCV,OCR
总结:花了半小时笔试,无奈C++不熟悉,所以就凭印象写了一些,但是map和hash_map还是看过的,不过只记得时间复杂度。。。这里发现不管是视觉岗还是算法岗都得会C++,赶紧啃起来!!!还有操作系统知识!
面试:
0.自我介绍
1.介绍项目,整个流程说了一遍之后就开始问项目当中的技术细节。
2.Yolov3相比于Yolov2有什么改进
a.首先网络结构上变成了darknet53,类resnet152,更深,在速度保持的前提下,准确度更高。
b.借鉴FPN特征金字塔,实现多尺度检测物体。
c.anchor聚类的个数变成了9类
d.训练的方式变了,在类别,置信度和xy偏移上都使用了binary cross entropy loss去训练。
3.anchor的细节(有点忘了问了什么细节了。。)
https://blog.csdn.net/hrsstudy/article/details/71173305?utm_source=itdadao&utm_medium=referral
https://blog.csdn.net/m_buddy/article/details/82926024
问到了anchor当中9个anchor的参数数字各代表什么意思?分开后的参数数字又代表什么?
答:分别代表9个anchor的长和宽啊
anchor在前向传播中哪个地方做了计算。
这里我答的不好
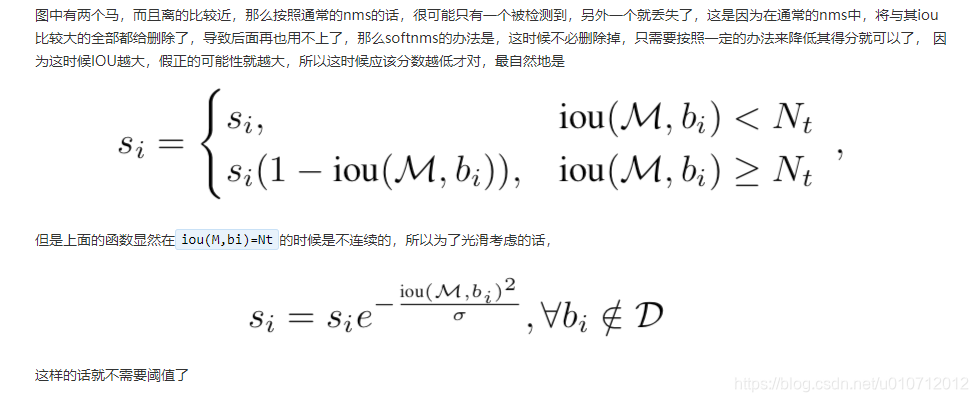
4.NMS的原理,假设两个人靠的非常近,则会识别成一个bbx,会有什么问题,怎么解决?
应该是想问softNMS
https://zhuanlan.zhihu.com/p/41046620

5.用什么来标注图片(labelimg),pascal voc的标注的格式(XML)
6.除了检测还会什么dl,答分类,问了resnet的细节,解决了什么问题,是什么结构?为什么能解决这些问题?resnet实现过程,画图说明,add,contact方式的区别和优缺点。相比GoogLenet的优势。
这里我答的也不好
7.读图片数据是用的什么(cv2),什么方式可以增加图片的维度?就是在(w,h,channel)的基础上增加一维Batch_size批量,numpy,TensorFlow怎么做到上述过程?
这里依然没答好
答:expand_dim(),tf.reshape()
8、TensorFlow最新版本的改进(Keras变成tf的高级接口了,直接tf.keras)
9.Pytorch当中permute和view的功能(可惜没用过,没答)。。。
https://blog.csdn.net/zz2230633069/article/details/83505793
10.有什么问题要问的。。
总结:
感觉只懂项目的具体流程完全不够,还必须把你所使用的算法的优点,框架实现细节给弄得非常清楚,不能只是用别人的代码训练自己的数据,而不做思考和改进。还有基础网络非常重要像VGG,GoogLeNet,ResNet的实现细节要很清楚,为什么能有这样的优点能娓娓道来。
感觉自己应该是凉了,因为只有一面,后面HR要我回去等通知了,正常的话一般是两面听说。细节不打好,面试两行泪啊~cv岗真难找,坚持下去吧只有!
转载自原文链接, 如需删除请联系管理员。
原文链接:miniVision(小视科技)面试总结,转载请注明来源!