衡量 MEMS 陀螺仪性能的重要指标之一就是随机漂移,现阶段,估算 MEMS 陀螺仪随机漂移主要有 1 和 Allan 方差两种方法,1 方法仅能掌握陀螺噪声的总体情况,不能有效地对每个噪声进行合理分离。
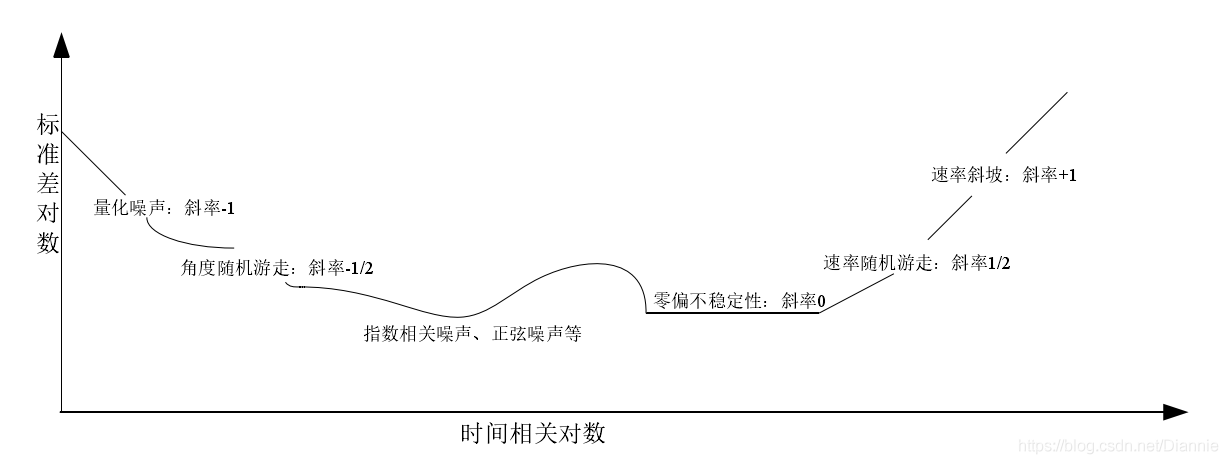
Allan 方差法可以对陀螺的各项噪声进行辨识,提取各项误差成分,并对陀螺的各项性能指标进行评估。
MEMS 陀螺仪输出速率:

式中,、
表示对应时刻的定位角,
为
与
时刻的时间间隔。
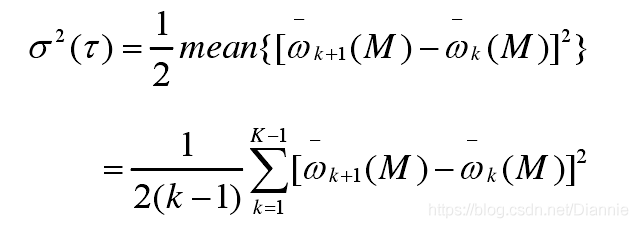
Allan方差可估算为:
忽略其他噪声影响,Allan方差可近似为各种噪声的和,化简得:

其中,Q:量化噪声误差系数;N:角速度随机游走误差系数;B:零偏不稳定性误差系数;K:速率随机游走误差系数;R:速率斜坡误差系数
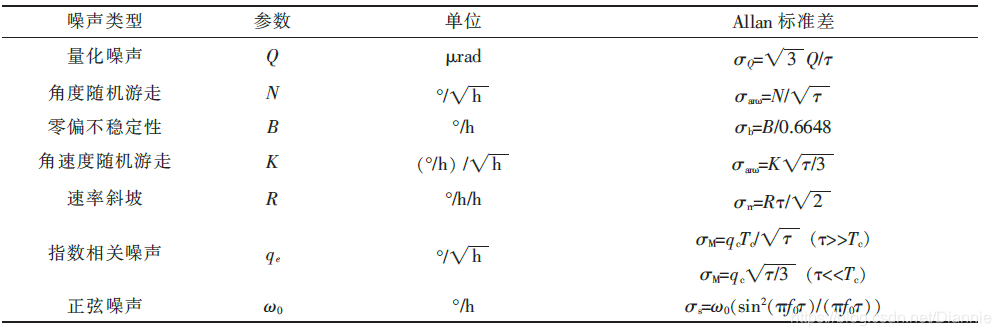
(ps:注意表格里B那一项是乘法不是除法,写错了)
转载自原文链接, 如需删除请联系管理员。
原文链接:allan方差,转载请注明来源!